
课时3交流伺服系统
知识点1 三相永磁式同步交流伺服电动机的结构特点,工作原理,伺服驱动器、伺服电机、CNC之间连接及其线号的意义作用。
数控机床上应用非常广泛的闭环位置控制系统,永磁同步交流伺服电动机为执行元件(无刷直流伺服电动机)。体积小、无电刷、宽调速、低速性能好过载能力强。
一、.三相交流电动机旋转磁场的产生原理:

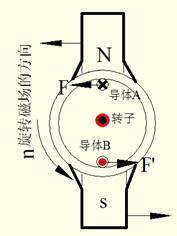
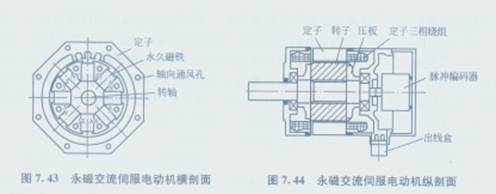
图4.31旋转磁场及转子转动原理示意图
1. 旋转磁场的产生原理:
![]() S转差率。定子的三相对称绕组通入三相对称交流电流的波形如图4.32 所示,图中画出了当Wt=0°、 60° 、120° 、180°、 240°;300°时的旋转磁场示意图。根据相对运动,鼠龙式转子的导体与旋转磁场的运动方向相反。
S转差率。定子的三相对称绕组通入三相对称交流电流的波形如图4.32 所示,图中画出了当Wt=0°、 60° 、120° 、180°、 240°;300°时的旋转磁场示意图。根据相对运动,鼠龙式转子的导体与旋转磁场的运动方向相反。![]()
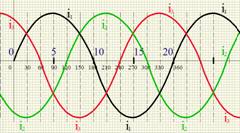
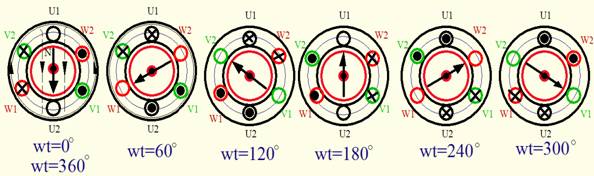
图4.32 不同时刻的旋转磁场示意图
2.三相异步电动机的同步转速:
![]() :f1 :定子绕组的三相对称电源的频率,p :旋转磁场的磁极对数。三相异步电动机的转子转速:
:f1 :定子绕组的三相对称电源的频率,p :旋转磁场的磁极对数。三相异步电动机的转子转速:
三相异步电动机的调速方法:
(1)、改变磁极对数调速
(2)、改变转差率调速(转子回路串电阻)
(3)改变三相电源的频率f1(变频调速)。
二.三相交流永磁同步电机的结构和工作原理
1.特点:体积小、无电刷及换向器(电子换向器),免维护,调速范围宽、低速性能好、过载能力强,扭矩/惯量比大等优点。
2.结构与原理:
转子用永久磁铁代替龙式异步电机转子,是直流伺服电机的倒置应用,定子圆周上均匀分布3个霍尔元件用来检测转子的位置,如图4.33 所示:转子每转过60度,三个霍尔元件会有一个产生信号0或1,其余输出高阻态。
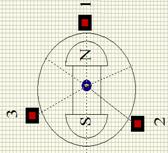
图4.33 永磁同步电机转子与定子霍尔元件位置关系图
| 转子角度 | 0 | 60 | 120 | 180 | 240 | 300 |
| 传感器1 | 1 | 高阻 | 高阻 | 0 | 高阻 | 高阻 |
| 传感器2 | 高阻 | 高阻 | 1 | 高阻 | 高阻 | 0 |
| 传感器3 | 高阻 | 0 | 高阻 | 高阻 | 1 | 高阻 |
2. 三相交流永磁驱动系统的点子换向器:
逆变器电路如图4.24 所示,利用转子位置传感器测得转子转过60° ,改变晶体管的导通与截止状态,就可以将直流电转变为等同于三相正弦交流电的形式,产生旋转磁场,使得转子转动起来,利用CNC的控制信号利用调频或PWM调压调速。
按照三相交流电的通电顺序:电子换向器(逆变器将直流电逆变成为三相对称绕组的交流电,由于绕组电感的作用,电流近视连续。但符合三相交流电的顺序及相位,所以产生了旋转磁场电机转动起来,由于同步电磁力的作用。改变定子绕组的电源频率可以实现无级调速。
| 电角度 | 0-60 | 60-120 | 120-180 | 180-240 | 240-300 | 300-360 |
| I1 | + | + | + | - | - | - |
| I2 | - | - | + | + | + | - |
| I3 | + | - | - | - | + | + |
| Vb1 | √ | √ | √ | × | × | × |
| Vb2 | × | √ | √ | √ | × | × |
| Vb3 | × | × | √ | √ | √ | × |
| Vb4 | × | × | × | √ | √ | √ |
| Vb5 | √ | × | × | × | √ | √ |
| Vb6 | √ | √ | × | × | × | √ |
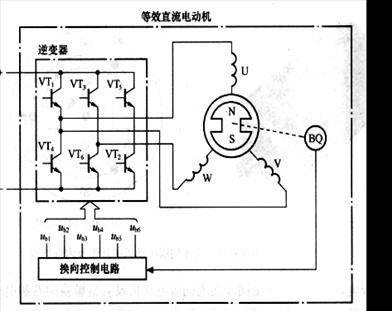
4.34 自动换向交流伺服驱动装置图
RST:电源输入一般是200V三相交流电源。
UVW:电动机的动力电源。
还有电机速度和位置反馈信号到伺服驱动或CNC 。
来自CNC的速度控制信号。模拟(-10V _0_+10V)VCMD GND ;
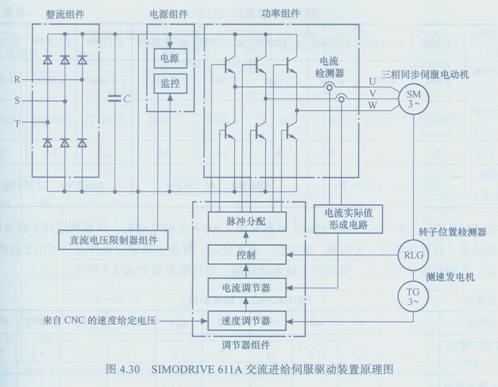
图4.35 SIMODRIVE611A交流伺服驱动装置原理图

