工业机器人技术基础
目录
(1)三点法示教工具坐标系的数学原理
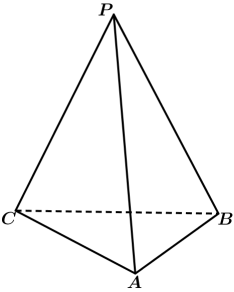
思考:下图1中为一个等腰三棱锥,PA=PB=PC,已知A、B、C点坐标,(1)是否能求P点坐标;(2)是否能求PA长度。
图1 等腰三棱锥
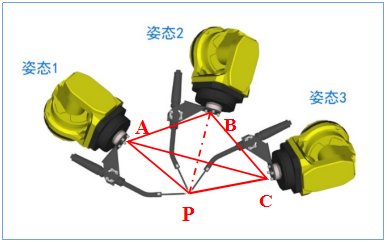
三点法示教工具坐标系时,需要依次示教并记录三个位置,如下图2所示;工业机器人根据自身的运动学方程,可求解A、B、C点坐标,见图3;根据三点定位法,可确定TCP点的位置,即确定了工具坐标系的原点位置;需要指出的是,三点法示教时,确定的工具坐标系方向与机器人末端法兰盘坐标系方向一致。
图2 三点法示意图
图3 三点法的原理
结合实训设备 FANUC LR Mate 200iD/4S,演示操作:
(1)使用笔形工具,设置一个新的工具坐标系。
(2)在某个指定位置,设置一个新的用户坐标系。
(3)使用夹爪工具,设置一个新的工具坐标系。 (4)使用吸盘工具,设置一个新的工具坐标系。以上四个问题,由指导教师现场抽查。
选择班级