机器人应用系统集成技术
侯文峰
目录
暂无搜索结果
1 课程学习指南
1.1 课程说明
1.2 课程目标
1.3 课程评价
1.4 安全规范
1.5 课堂礼仪
2 软件安装
2.1 免责声明
2.2 RobotStudio安装
2.3 TIA Portal安装
2.4 PQArt安装
2.5 PQFactory安装
2.6 西门子数控单元828D安装
3 集成系统单元模块认知
3.1 集成系统单元模块的构成
3.1.1 机器人系统集成应用平台
3.1.2 集成系统单元模块
3.2 集成系统单元的电气接口
3.3 集成系统单元的通信模块与接口
4 总控单元集成调试与应用
4.1 总控单元知识准备
4.1.1 总控单元介绍
4.1.2 总控单元信号分配图
4.2 系统方案设计
4.2.1 系统布局方案
4.2.2 控制系统方案设计
4.3 总控单元集成调试
4.3.1 安装GSD文件
4.3.2 PLC1-PLC3组态
4.3.3 PLC传输设置
4.3.4 总控单元PLC
4.3.5 总控单元PLC下载到设备
4.3.5.1 PLC程序通过网线从电脑下载到设备
4.3.5.2 总控单元PLC下载到设备
4.3.6 总控单元控制面板调试(效果)
5 执行单元集成调试与应用
5.1 执行单元知识准备
5.1.1 执行单元介绍
5.1.2 执行单元信号分配图
5.1.2.1 IRB1100执行单元信号分配图
5.1.2.2 IRB120执行单元信号分配图
5.1.3 远程I/O模块及I/O地址
5.1.4 执行单元集成调试
5.2 PLC组态IRB1100与IRB120
5.2.1 PLC组态IRB120
5.2.2 PLC组态IRB1100
5.3 PLC_3新增伺服轴工艺对象并伺服轴控制面板调试
5.3.1 PLC_3新增伺服轴工艺对象
5.3.2 伺服轴控制面板调试
5.3.3 伺服轴控制面板调试(效果)
5.4 伺服轴PLC控制
5.4.1 伺服轴PLC程序
5.4.2 PLC_1与PLC_3之间数据传送程序
5.4.3 伺服轴PLC程序调试
5.4.4 伺服轴PLC程序调试(效果)
5.4.5 伺服轴启用程序与伺服轴控制面板调试转换(选用)
5.5 伺服轴HMI
5.5.1 设置PG/PC接口
5.5.2 伺服轴HMI
5.5.3 伺服轴HMI调试
5.5.4 伺服轴HMI调试(效果)
5.6 执行单元RobotStudio程序IRB1100
5.6.1 IRB1100控制器配置
5.6.2 IRB1100 IO信号设置
5.6.3 IRB1100 RobotStudio程序
5.6.4 网线联接控制柜MGMT接口与电脑USB或者网络接口
5.6.5 IRB1100虚拟示教器与真实示教器数据传送
5.6.6 IRB1100虚拟示教器与真实示教器数据传送(效果)
5.6.7 IRB1100RobotStudio程序调试(效果)
5.6.8 设置个性化可编程键
5.6.9 设置个性化可编程键(效果)
5.7 执行单元RobotStudio程序IRB120
5.7.1 IRB120控制器配置
5.7.2 IRB120 IO信号设置
5.7.3 IRB120 RobotStudio程序
6 仓储单元集成调试与应用
6.1 仓储单元知识准备
6.1.1 仓储单元介绍
6.1.2 仓储单元信号分配图
6.2 中断集成调试
6.2.1 仓储单元PLC程序
6.2.2 仓储单元HMI
6.2.3 中断调试PLC程序
6.2.4 仓储单元RobotStudio程序
6.2.5 中断调试RobotStudio程序
6.2.6 中断调试
6.2.6.1 中断调试RobotStudio程序示教器数据传送
6.2.6.2 中断调试RobotStudio情况一调试(效果)
6.2.6.3 中断调试RobotStudio情况二调试(效果)
6.3 流程选择中断A集成调试
6.3.1 仓储单元PLC程序(流程选择中断A)
6.3.2 仓储单元RobotStudo程序(流程选择中断A)
6.3.3 仓储单元RobotStudo程序(流程选择中断A)调试(效果)
6.4 流程选择中断B集成调试
6.4.1 仓储单元PLC程序(流程选择中断B)
6.4.2 仓储单元RobotStudo程序(流程选择中断B)
6.4.3 仓储单元RobotStudo程序(流程选择中断B)调试(效果)
6.5 仓储单元至少有一个空仓的轮毂排序(扩展)
6.5.1 仓储单元至少有一个空仓的轮毂排序流程
6.5.2 仓储单元至少有一个空仓的轮毂排序RobotStudio程序
6.5.3 仓储单元至少有一个空仓的轮毂排序调试(效果)
7 分拣单元集成调试与应用
7.1 分拣单元知识准备
7.1.1 分拣单元介绍
7.1.2 分拣单元信号分配图
7.2 分拣单元集成调试
7.2.1 分拣单元PLC程序
7.2.2 分拣单元HMI
7.2.3 分拣单元RobotStudio程序
7.2.4 分拣单元RobotStudio程序调试(效果)
8 打磨单元集成调试与应用
8.1 打磨单元知识准备
8.1.1 打磨单元介绍
8.1.2 打磨单元信号分配图
8.2 打磨单元集成调试
8.2.1 打磨单元PLC程序
8.2.2 打磨单元HMI
8.2.3 打磨单元RobotStudio程序
8.2.4 打磨单元集成调试(效果)
8.3 仓储单元全仓时通过打磨单元的轮毂排序(扩展)
8.3.1 仓储单元全仓通过打磨单元的轮毂排序流程
8.3.2 仓储单元全仓通过打磨单元的轮毂排序RobotStudio程序
8.3.3 仓储单元全仓通过打磨单元的轮毂排序调试(效果)
8.3.3.1 仓储单元全仓通过打磨单元的轮毂排序情况一调试(效果)
8.3.3.2 仓储单元全仓通过打磨单元的轮毂排序情况二调试(效果)
9 数控单元集成调试与应用
9.1 数控单元知识准备
9.1.1 数控单元介绍
9.1.2 数控单元信号分配
9.2 CNC系统的PMC
9.2.1 连接CNC内部PLC
9.2.2 上载CNC内部PLC
9.2.3 PMC编程主要内容
9.2.4 下载CNC内部PLC
9.2.5 打开已保存的CNC内部PLC
9.3 PMC编程
9.3.1 报警信息设置
9.3.2 双键控制
9.3.2.1 双健控制任务
9.3.2.2 双健控制PMC程序
9.3.3 单健控制
9.3.3.1 单健控制任务
9.3.3.2 单健控制PMC程序
9.4 CNC刀库
9.4.1 创建刀具库
9.4.2 卸载刀具
9.4.3 装载刀具
9.5 数控加工前对刀
9.5.1 手柄操纵机床运动
9.5.2 设置零偏_XY轴对刀
9.5.3 设置零偏_Z轴对刀
9.6 图标数控加工
9.6.1 图标数控加工任务
9.6.2 图标数控加工程序
9.7 数控单元集成调试
9.7.1 数控单元PLC程序
9.7.2 数控单元HMI
9.7.3 数控单元RobotStudio程序
9.7.4 数控单元集成调试(效果)
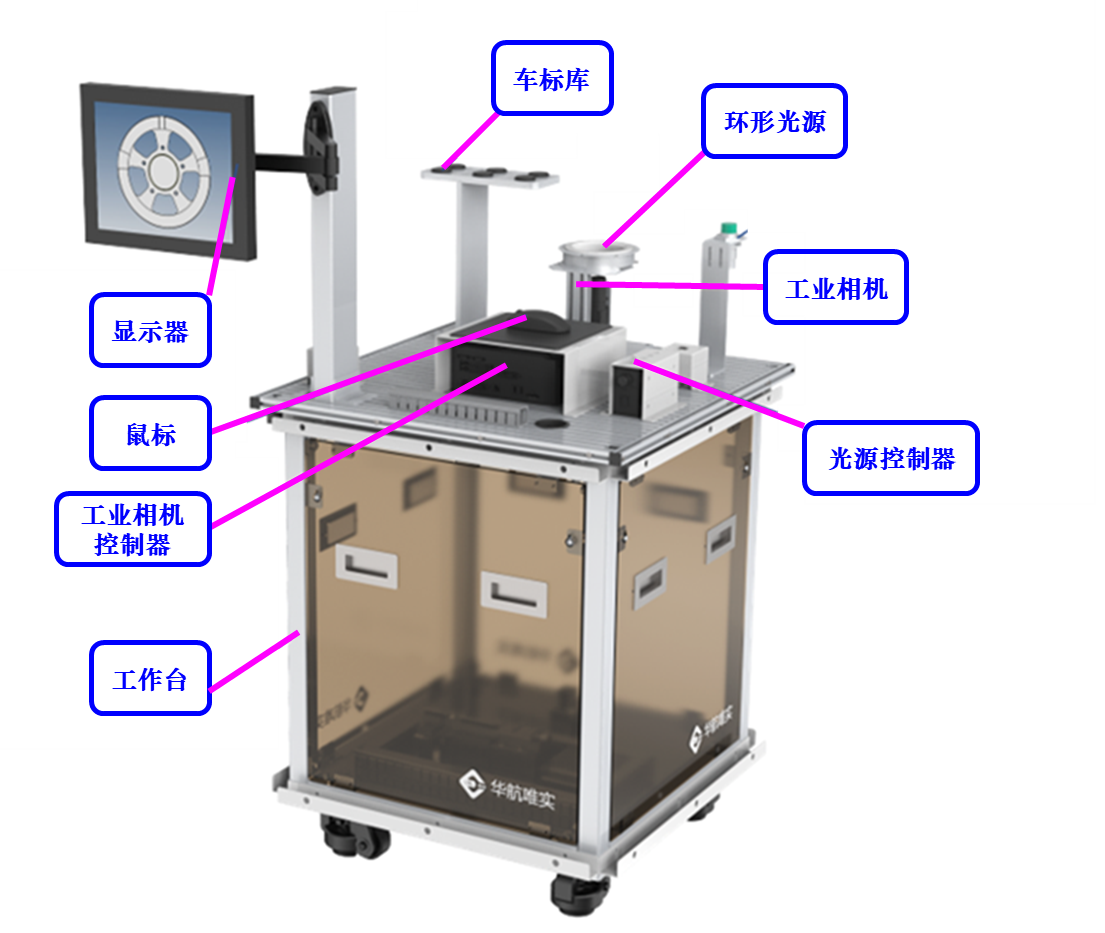
10 视觉检测单元的集成调试与应用
10.1 视觉检测单元的工作原理与通信设置
10.1.1 视觉检测单元的工作原理
10.1.2 视觉检测单元的通信设置
10.2 教学任务
10.3 任务实施
10.3.1 视觉检测单元的集成调试
10.3.2 RFID模块的设置与PLC联调
10.3.3 车标模块的联合调试
10.3.4 视觉检测单元的二次开发
11 压装单元与SCRAR机器人单元的集成调试与应用
11.1 压装单元的工作原理与通信设置及编程
11.1.1 压装单元的工作原理
11.1.2 压装单元的通信设置
11.1.3 教学任务1
11.1.4 任务实施1
11.1.4.1 压装单元的PLC编程
11.1.4.2 压装单元的RobotStudio程序
11.2 SCARA机器人单元的通信设置与编程
11.2.1 SCARA机器人单元的通信设置
11.2.2 SCARA机器人单元的编程
11.3 压装单元与SCARA机器人单元的集成调试
12 仿真集成调试与应用
12.1 PQArt仿真知识准备
12.1.1 工具类型
12.1.2 仿真任务分组
12.2 PQAr仿真集成调试
12.2.1 仿真任务
12.2.2 从模板库导入模型
12.2.3 定义状态机
12.2.4 PQArt任务实施
12.3 PQFactory仿真调试(扩展)
12.3.1 教学任务
12.3.1.1 系统方案设计
12.3.1.2 系统仿真搭建
12.3.1.3 虚拟调试
12.3.2 PQFactory任务实施
12.3.3 PLC任务实施
13 实操考核
13.1 智能产线集成与应用 课程实操考核
13.1.1 样题A
13.1.2 样题A 实操考核参考
13.1.3 样题B
13.1.4 样题B 实操考核参考
13.1.5 《智能产线集成与应用》课程实操考核 评分表
13.2 工业机器人集成应用职业技能等级证书(中级)实操考核
13.2.1 1+X样题A
13.2.2 1+X样题A 实操考核参考
13.2.3 1+X样题B
13.2.4 1+X样题B 实操考核参考
13.2.5 1+X实操考核 评分表
13.3 工业机器人系统集成与应用 课程实操考核
14 问题杂锦
14.1 伺服轴超限
14.1.1 伺服轴轻微超限
14.1.2 伺服轴深度超限
14.2 RobotStudio报错
14.2.1 程序数据位置不能更新
视觉检测单元的工作原理与通信设置
上一节
下一节
选择班级
确定
取消
图片预览