
1、常规飞机布局
与有人飞机的常规式布局类似:平尾和垂尾后置的布局,有时设计V形尾代替平尾和垂尾。
但无人机的机身体积较小,动力系统通常为前置螺旋桨或涡轮(或冲压)喷气发动机。
2、双尾撑布局
双为撑布局是常规式布局的一个变化种类:通常机身较短,从机翼后面伸出的两个尾撑杆支撑一个平尾和两个垂尾。
该无人机动力系统通常为后置在机身、处于两个尾撑之间的螺旋桨。


3、鸭式布局
鸭式(平尾前置)布局,通常垂尾后置或无垂尾。鸭式布局的前翼在拉升时提供正升力,故又叫做“抬式飞机”。鸭式布局的主要好处是拉升操纵机动性好和提高升阻比,但是减小了纵向稳定性。

4、无尾布局
通常指无平尾布局,仍有垂尾。由于减去了平尾引起的配平阻力,提高了升阻比,并减轻了飞机重量,但是起降性能不如其他布局。


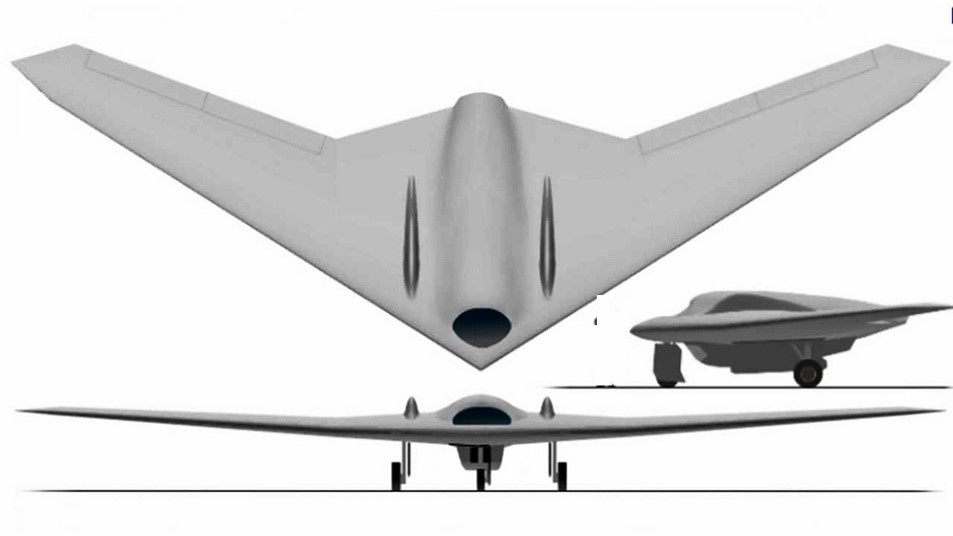
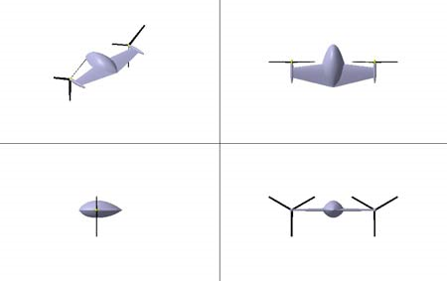
5、飞翼式布局
指既无平尾也无垂尾、且翼身融合的布局。飞翼布局有较高的升阻比,隐身性能好,并减轻了飞机重量,俯仰和横航向控制依靠机翼后缘的各种襟翼和副翼。

1、单旋翼无人直升机
类似于单旋翼有人直升机,通常需在机身尾部安装侧向尾桨,以提供平衡旋翼的反扭矩和控制航向。

2、共轴双旋翼无人直升机
两副转向相反的旋翼上下共轴安装,两个旋翼的反扭矩相互平衡。
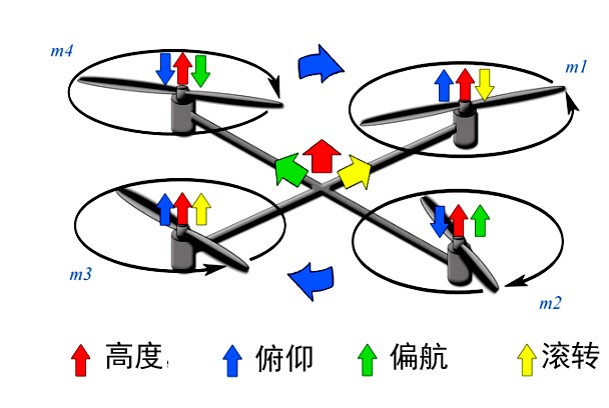
3、多旋翼无人机
目前有四旋翼、六旋翼、八旋翼等小型无人机,每一对旋翼旋转方向相反,以抵消反扭矩。利用对角旋翼转速差动来改变航向。


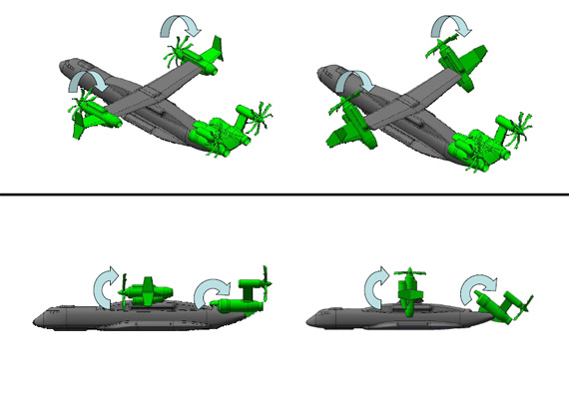
1、倾转旋翼无人机
相当于螺旋桨安装在无人机上,螺旋桨(旋翼)可以绕机体Y轴线倾转,起飞时旋翼呈水平位置可以像直升机一样垂直起飞和悬停,而旋翼转至垂直位置则可像固定翼飞机一样飞行。
实现倾转旋翼无人机的关键是倾转过程中的自动控制技术。

2、倾转旋翼机翼无人机
相当于螺旋桨安装在机翼上的飞机,机翼连同螺旋桨(旋翼)可以绕机翼轴线倾转,起飞时旋翼呈水平位置可以像直升机一样垂直起飞和悬停,而旋翼转至垂直位置则可像固定翼飞机一样飞行。
3、自转旋翼无人机
旋翼机的发动机不直接带动旋翼,而是靠后置螺旋桨推动前进时的相对气流吹动旋翼,就像小时候玩的纸风车一样。
旋翼机向后倾斜的旋翼在前飞时迎风气流的作用下旋转并产生升力,而直升机前飞时旋翼是向前倾斜的。旋翼机的安全性较高,因为在发动机停车后,它依然可以滑翔落地。旋翼机像飞机一样滑跑起飞,不能垂直起飞和悬停。