一篇文章的研究写作步骤如下:
1) 听组会,看文章,跟踪1到2个国内外课题组方向;
2)选方向,采集数据,下载1到2个开源程序,编译调试;
3)设计算法,采集数据,自己设计或优化算法程序(可以基于开源代码);
4)再回头看以前看过的文章,选参考文献,熟读精读2到3篇最相关的文章;
5)选期刊,浏览期刊里相关的几篇相关文章;
6)先写出算法内容,实验方法,实验结果和分析,做成PPT准备组会汇报;
7)写出研究背景和意义,写出摘要;
8)参考以前精读的文章写作思路,写出全文初稿,修订全文初稿;
9)找老师或合作作者,讨论修改,至少3轮全文修改;
10)按期刊刷格式,至少3遍通篇检查,提交论文,使用学校邮箱。
题目:先草拟一个,能够往下推进写作即可,边写边讨论题目取名
摘要:最后写,或者写完方法再写。
一、引言(Introduction)的3段式的写法:
1. 写明论文的研究背景,说明本研究与前人工作的关系。概括性地写清本领域或相关领域内前人所做的工作,如他们研究的贡献,或还存在的问题,从而使读者对该研究工作的目的和重要性有所了解。(要充分考虑投稿期刊的方向)
2. 说明本研究的技术路线总体思路。本文如何沿袭前人的研究成果和路线,准备采用何种或哪些方法和理论依据等来研究本文。
3. 论文预期达到的目的,研究的意义及论文的创新点。如果是沿用已知的理论、原理和方法,只需简略提及,或标注出处即可.It is common to present the objective or aim of the study at the end of the introduction.
必要时,可交代本文的方法和结果的用途,即可供哪些人、或哪些领域。
引言必须引用前人的文献,文献应该是代表性的,能确切反映本文研究主题的。
二、相关研究工作(Related work):
第一段(2-3句话),目前的研究趋势或挑战;从哪个角度介绍related work;后面的介绍整体而言分哪几类。
然后,最好是用分类学的方法来介绍相关工作。每个类别里,把相同的方法再凝练,提炼出大的思路,可以介绍一些优点和缺点。
Related work最后,把回归到本文的研究上,因为前面方法存在的问题(或者受到前面方面的启发),所以本文设计什么样的思路解决问题。
三、本文算法/方法(Methodology):
逻辑要清楚,可以由一个框图把逻辑串联起来,算法设计的步骤讲清楚。
每一步算法介绍分3步(适当添加示意图、示例图):
第一句话为什么用这个算法,或者由什么引出这个算法;
中间主体算法的数学形式;
最后一句话,这个步骤输出什么,或者解决什么问题。
四、实验分析(Experiment):
实验准备,包括:
数据来源和特点介绍、
算法的参数选择、
配置计算机环境、
本文的定量评价指标的定义或选择
定性的结果,展示结果图片,分析这个结果表面什么情况。
定量的分析
对比实验分析
最后可以简要介绍本文可能存在的limitation
五、结论(结束语,讨论)的要求
结论(或结束语)是整篇文章的最后总结,它主要回答“研究出了什么”。它应该以正文中的试验或考察中得到的现象、数据和阐述分析作为依据,由此完整、准确、简洁地指出以下结论:
(1)研究得到的结果,以及本文研究结果所揭示的原理及其普遍性;
(2) 研究中有无发现例外或本论文尚难以解释和解决的问题;
(3) 与先前已经发表过的(包括他人或者自己)研究工作的异同;
(4) 本论文在理论上与应用上的意义与价值;
(5) 必要时可提出进一步深人研究本课题的建议。
常用的表达
多读SCI文章,可以摘录一些常用语、管用句子。
在以前的工作中 In the previous work,
与最新技术的广泛比较 by extensive comparisons with state-of-the-art techniques
在不同的数据集上评估了该方法的有效性: The effectiveness of this method is evaluated on different datasets
test on two publicly available datasets, namely A and B
开源代码:Our implementation is publicly available. Our code is available at
然而,***工作仍面临挑战 However, it is still a challenge to
参数设置:The parameter lambda is set to 12345 for (some reason).
多幅子图同时说明: Images (a) to (c) show that/ something.
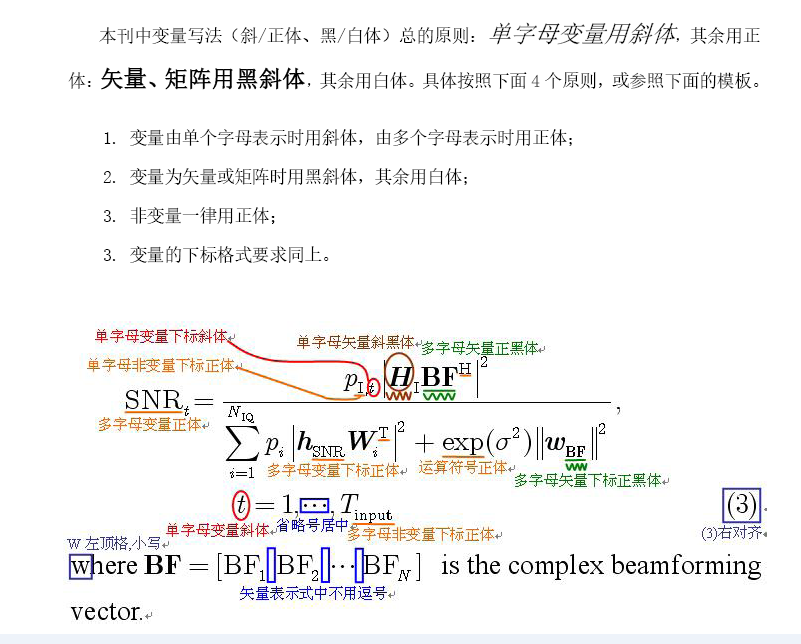
【中文的数学符号、公式编辑】参考如下: