逆向工程关键技术之数据处理
上一节
下一节
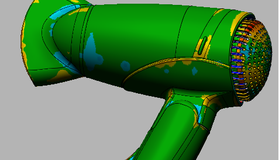
扫描仪输出的数据往往是以散乱点形式无序排列的大量点云(技术上通常将扫描得到的数据点称为点云)。故而在进行后续的操作——曲面造型和CAD重构前,必不可少的一步就是数据处理,也称作“点云”处理。
主要的点云处理步骤包括去除杂点、数据拼接、数据精简和数据插补等操作。
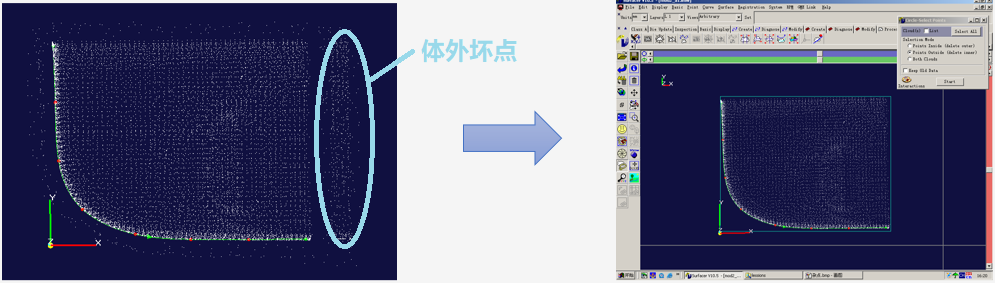
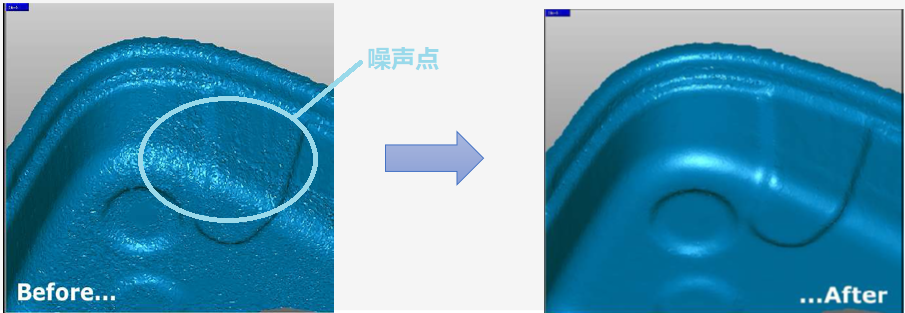
1) 去除杂点
受测量设备和环境因素影响,扫描后得到的“点云”均会存在大量的杂点(包括体外坏点和噪声点),这些无用点会使软件计算过程变慢,并影响曲面重构的准确性,因而需进行剔除。杂点剔除包括:去除体外坏点和数据平滑两种操作。
2) 数据拼接
对于非接触式的激光扫描,很多零件是不能一次就采集到所有数据的,需要经过多次扫描,得到的多个“子点云”。拼接就是将多个点云整合后,合并到统一的坐标系下。

不过,现在很多三维扫描仪,系统内置拼接功能。输出的都是已经拼接好的点云。
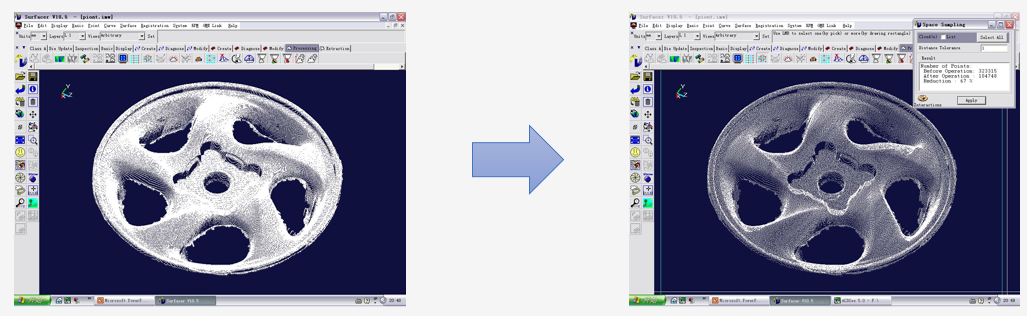
3)数据精简
扫描仪每扫过一个位置,会产生数千甚至上万的数据点。直接处理这么大量的数据是十分困难的。在不损失模型特征的情况下,需要适当的对点云进行有效的精简。
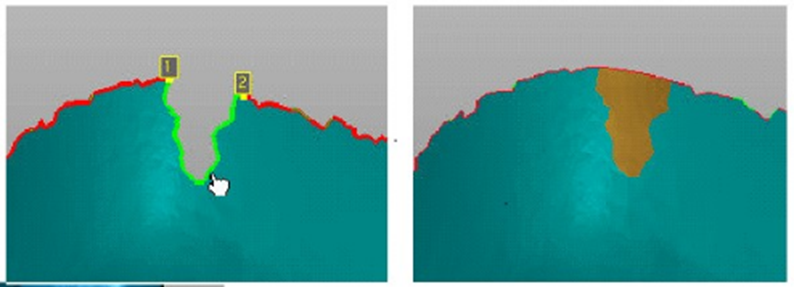
4)数据插补
受零件结构以及测量机的限制,在获取测量数据时会存在一些探头无法测到的区域,表现在面片修补中就会使曲面出现缺口,影响后期的曲面造型。因而,数据预处理时,需要对这些缺口进行填补。
数据处理讲解视频

