无人机在类型、布局形式上具有多样性。不同类型不同布局形式的无人机在操控方式上存在很大差异。但在无人机飞行控制中所涉及到的控制思想与控制原理又具有一致性。




①控制的基本思想:反馈。
②反馈理论的要素包括三个部分:测量、比较和执行。
测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
③控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。

飞行控制律,即飞行控制系统形成控制指令的算法。
飞行控制律描述了受控状态变量与系统输入信号之间的关系。
当无人机飞行状态得到正确测量后,与期望值进行比较,飞行控制律就是根据两者之间的差异,来决定无人机执行何种操纵,来消除实际值与期望值之间的差异。
目前,无人机飞行控制律设计中,普遍采用的有PID控制方法、模糊控制方法等。
下面,以固定翼无人机俯仰姿态控制为例,来介绍各类常用的飞行控制方法。
1、PID控制
PID (比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。
PID 控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器,在无人机飞行控制中也得到广泛应用。
PID控制使用中只需设定三个参数(Kp,Ki和Kd)即可。
在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
比例(P)控制:控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差;
积分(I)控制:在积分控制中,控制器的输出与输入误差信号的积分成正比关系。比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差;
微分(D)控制:在微分控制中,控制器的输出与输入误差信号的微分成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。增加“微分项”能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。

δe=kP(θd-θ)+kDWy
2、模糊控制
模糊控制是基于模糊数学的基本思想和理论的控制方法。特点:
①无需知道被控对象的数学模型
②是一种反映人类智慧思维的智能控制(模糊控制采用人类思维中的模糊量,如“高”、“中”、“低”等,且控制量由模糊推理导出);
③易于被人们所接受(核心:控制规则);
④构造容易;
⑤鲁棒性好。
人员操纵无人机飞行时,通过观察无人机飞行姿态与轨迹,对其飞行进行控制。当操纵人员获得观测数据时,根据所积累的知识和操纵经验,做出决策,并采取相应的控制动作。显然,这种决策过程不是通过精确的定量计算,而是依靠定性的或模糊的知识。
例如,在纵向姿态控制时,操纵人员所感知的只是纵向姿态的概念量,比如说“俯仰角非常偏大”,他使用这一概念与头脑中已有的控制经验和模式相匹配,得到“俯仰角非常偏大应该推杆使升降舵较大正偏”的推断,进而由控制机构将“推杆使升降舵较大正偏”按照某定量值执行,从而完成整个飞行控制过程的一个循环。
无人机模糊飞行控制律设计步骤:
①建立无人机各状态参数及控制量的模糊集合;
②按照一定的模糊规则,确定模糊控制表,得到模糊关系;
③根据模糊关系进行模糊运算,得到相应的模糊控制量;
④根据一定的去模糊规则,将模糊控制量转化为精确数值,得到不同状态参数组合下的控制量,绘制模糊控制表面图
在固定翼无人机俯仰姿态模糊控制律设计中,采用俯仰角实际值与期望值之间的偏差以及偏差变化率(当期望值不变时即为俯仰角速率)作为状态参数,升降舵偏角为控制量。
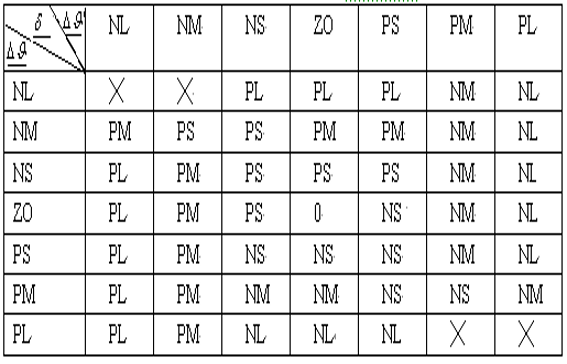
建立状态参数及控制量的模糊集合:对状态参数(俯仰角偏差、偏差变化率)和控制量(升降舵偏角)按照一定精度在一定范围内进行模糊化处理,并以模糊集{PL,PM,PS,ZO,NS,NM,NL}的形式来描述。
建立模糊规则表,得到模糊关系:根据人员操纵经验,归纳出模糊规则表,即得到在不同的状态参数组合到控制量的模糊推理。
根据每条推理规则,求出相应的模糊关系
再根据模糊关系合成法则,建立总的模糊关系。
根据模糊关系进行模糊运算,得到相应的模糊控制量
根据一定的去模糊规则,将模糊控制量转化为精确数值,得到模糊控制表面图。
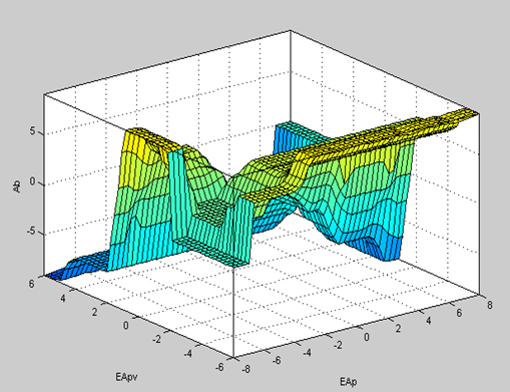
对于任意一组俯仰角偏差 和偏差变化率组合,都可以获得相应的控制输出。在实际飞行中根据每一时刻的状态参数,能够实时地直接由控制规则表得到相对应的控制行为。
在离线状态下能够根据实际情况对控制规则表进行检验修正,使其符合控制的实际要求。
无人机的飞行控制任务复杂、控制对象特性差异巨大,需要根据实际情况选择PID方法、模糊控制或其他类型的控制方法来设计无人机飞行控制律。