学习目标
1 多旋翼无人机典型的操控方式是怎样的?
2 简述如何实现使一架原本处于悬停状态的多旋翼无人机进行某个速度的定高匀速直线飞行?

多旋翼无人机具有能定点悬停、垂直起降、机动灵活以及安全性好等优势。与常规固定翼无人机和直升机相比,多旋翼无人机在运动特性以及控制方式上有很大不同。


常规直升机通过对总距和周期变距的控制来改变直升机的拉力大小和运动方向,而多旋翼无人机一般则通过调整各个电机与螺旋桨的转速,来实现对无人机的姿态与位置的控制。由于多旋翼无人器具有高度耦合的动态特性,一个螺旋桨转速的改变将至少影响三个自由度方向上的运动。

从飞行要求来看,多旋翼无人机应具备空间六个自由度和三个可控的基本运动状态。
三个可控的基本运动为:垂直运动、水平直线运动(前后/侧向飞行)、水平转动。
控制运动状态的参数有:飞行高度,垂直速度、平飞速度,俯仰角,滚转角,偏航角。
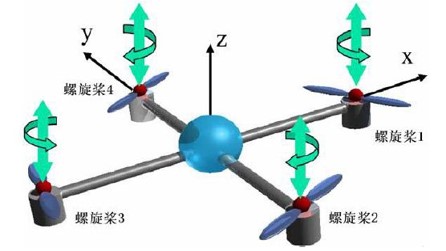
多旋翼无人机飞行控制---以四旋翼无人机为例:
1、垂直运动
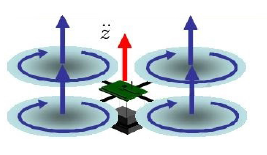
垂直运动控制较为简单,同时增加四个电机的输出功率,增加螺旋桨转速,使得总的拉力增大,无人机垂直向上飞行;反之,则垂直向下飞行。
垂直运动控制时,可将飞行高度、垂直速度作为控制状态参数。设定期望高度、期望垂直速度,采用一定控制方法(PID/模糊控制等),同时调整四个电机的功率,改变螺旋桨拉力,对飞行高度与垂直速度进行调整。
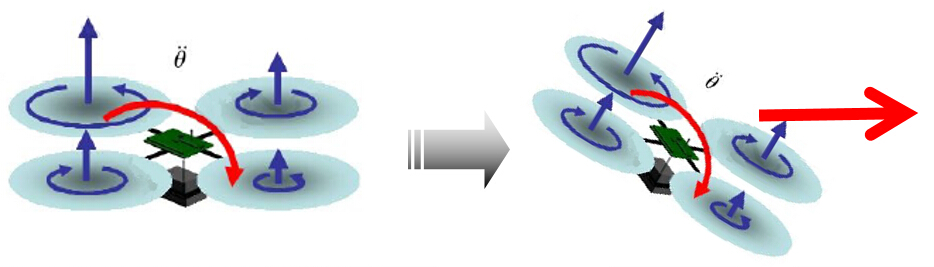
2、水平直线运动(前后/左右运动)
水平直线运动可分为前后运动与侧向运动,由于四旋翼无人机具有轴对称性,因此前后运动与侧向运动在操控方式上相同。
以前后运动为例,分别减小和增加前后螺旋桨的转速,产生拉力差,形成低头力矩,使机身低头,产生拉力的前向分量,使无人机向前运动;向后飞行类似。
水平前后运动控制时,可将俯仰角、水平速度作为控制状态参数。设定期望俯仰角、期望水平速度,采用一定控制方法(PID/模糊控制等),同时增加、减小前后两个电机的转速,使前后两个螺旋桨产生拉力差,对机身产生低头或抬头力矩,从而实现对俯仰角和水平速度的调整。
3、水平转动
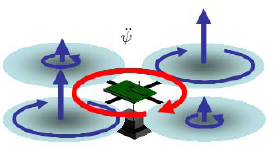
四旋翼无人机的水平转动可以借助螺旋桨产生的反扭矩来实现。反扭矩的大小与螺旋桨转速有关,当四个螺旋桨转速相同时,反扭矩互相平衡,无人机不发生转动;当四个螺旋桨转速不同时,不平衡的反扭矩会引起四旋翼无人机的水平转动。
水平转动控制时,可将偏航角作为控制状态参数。设定期望偏航角,采用一定控制方法(PID/模糊控制等),改变四个螺旋桨的转速,使四个螺旋桨产生的反扭矩不能相互平衡,对机身产生扭转力矩,从而实现对偏航角的调整。
多旋翼无人机的三个基本运动状态控制之间存在严重的耦合。某个基本运动状态控制时对螺旋桨转速产生的改变,极有可能破坏其他基本运动状态的平衡与稳定。因此,多旋翼无人机飞行时,应同时对三个基本运动状态进行控制,以保证飞行控制的全局稳定。