工业机器人工作站系统集成
邵金均
目录
暂无搜索结果
1 走进机器人系统集成
1.1 课程介绍引入
1.2 机器人系统集成的规划
1.3 设计一个搬运工作站
2 机器人系统集成分析
2.1 系统集成技术要求解析
2.2 工作站系统流程分析
3 机械系统模块设计
3.1 机器人本体选型
3.2 末端执行器选择与设计
3.3 其它机械结构设计
4 工件检测模块设计
4.1 视觉系统与视觉模块设计
4.2 电机传动与输送系统设计
5 控制系统模块设计
5.1 气动系统设计
5.2 外部传感器选型
5.3 PLC选型
6 工作站系统功能集成开发
6.1 电气电路设计
6.2 PLC与外部设备的数据交互
6.3 PLC网络通讯控制(+)
6.4 工作站程序设计
6.5 工业机器人离线仿真与在线修正
7 焊接机器人系统集成设计
7.1 焊接分类与弧焊机器人工作站
7.2 焊接机器人关键部件与选型
7.3 弧焊工作站电气电路设计
7.4 弧焊机器人工作站程序设计
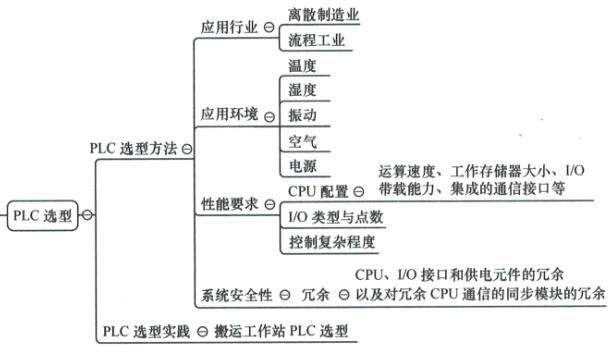
PLC选型
上一节
下一节
PLC选型知识图谱
一、PLC选型方法
二、PLC选型实践
思考与讨论
选择班级
确定
取消
图片预览