机器人系统集成的规划
上一节
下一节

扫描上图中二维描,学习机器人系统集成概述。
推荐学习以下视频(第1波推荐)
https://www.bilibili.com/video/av34869267/?spm_id_from=333.788.videocard.1
https://www.bilibili.com/video/av35039710?from=search&seid=82708367796491022
https://www.bilibili.com/video/av67645053?p=37
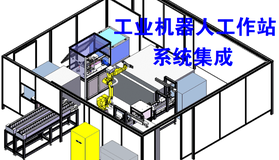
1.认识工业机器系统集成
工业机器人集成就是把标准机器人(本体)变为应用机器人。
这里面必须把工业机器人本体、机器人控制软件、机器人应用软件、机器人周边设备结合起来,成为系统,应用于焊接,打磨,上下料、搬运、码垛、机加工、喷涂、装配等工业自动化。
2.工业机器系统集成发展
在工业机器人系统集成中,机器人本体是系统集成的中心,它的性能决定了系统集成的水平。
3.工业机器系统集成技术方案
机器人系统集成技术方案的步骤与方法: 八步
(1)解读分析工业机器人工作任务
(2)工业机器人的合理选型
(3)末端执行器的合理选用或设计
(4)工艺辅助软件的选择和使用
(5)外部设备的合理选择
(6)外部控制系统的设计和选型
(7)系统的电路与通信配置
(8)系统安装与调试
4.工业机器系统集成设计流程


