
2024年校内赛要求:要求参赛选手在指定的比赛设备上建立ROS包,包的名字规则为pkgxxx(xxx为选手名字拼音缩写)。选手自行开发的代码需放置在其包下面,通过各自包下的launch文件启动。
参赛设备1:spark-7797,热点为spark-7797,安全密钥连接,密码为:12345678,连接热点后,
通过VNC Viewer连接到该主机,IP地址为:10.42.0.1
工作区:ws_2024
在ws_2024工作区下建立包,包的名字规则为pkgxxx(xxx为选手名字拼音缩写)。
步骤1、创建工作区
注:如果该步骤之前已完成,则可以省略
(注:其中ws_2024为工作区的名字)
$ mkdir -p ~/ws_2024/src
$ cd ~/ws_2024/src
$ catkin_init_workspace
$ cd ~/ws_2024
$ catkin_make
$ source ~/ws_2024/devel/setup.bash
$ rospack profile
$ echo "source ~/ws_2024/devel/setup.bash" >> ~/.bashrc
步骤2、创建包(如果该步骤之前已经完成,则可省略)
(注:其中pkgduan为包的名字)
$ cd ~/ws_2024/src
$catkin_create_pkg pkgduan std_msgs geometry_msgs rospy roscpp
$ cd ~/ws_2024
$ catkin_make
步骤3、建立launch目录、scripts目录:
$roscd pkgduan
$mkdir launch
$mkdir scripts
$cp ~/spark_noetic/src/3rd_app/move2grasp/launch/teleop2grasp.launch launch
$cp ~/spark_noetic/src/3rd_app/move2grasp/scripts/teleop.py scripts
$cp ~/spark_noetic/src/3rd_app/move2grasp/scripts/grasp_pro_new.py scripts将~/spark_noetic/src/3rd_app/move2grasp/launch/teleop2grasp.launch文件拷贝到launch目录,
将~/spark_noetic/src/3rd_app/move2grasp/scripts/teleop.py文件拷贝到scripts目录
将~/spark_noetic/src/3rd_app/move2grasp/scripts/grasp_pro_new.py文件拷贝到scripts目录
步骤4、修改launch目录下的teleop2grasp.launch文件,修改后存盘退出
$roscd pkgduan/launch
$gedit teleop2grasp.launch
原来的文件内容包括:
<node pkg="move2grasp" type="teleop.py" name="teleop" launch-prefix="xterm -e" />
<group if="$(eval arg('camera_type_tel')=='d435')">
<node pkg="move2grasp" type="grasp_d435.py" name="grasp" output="screen">
<remap from="/camera/rgb/image_raw" to="/camera/color/image_raw" if="$(eval arg('camera_type_tel')=='d435')"/>
</node>
</group>
<group if="$(eval arg('camera_type_tel')=='astrapro')">
<node pkg="move2grasp" type="grasp_pro_new.py" name="grasp" output="screen"/>
</group>
将其中的 pkg="move2grasp" 改为 pkg="pkgxxx" (其中pkgxxx为你的包的名字,有三个地方需要改,也就是启动你自己包下的节点),如下:
<node pkg="pkgxxx" type="teleop.py" name="teleop" launch-prefix="xterm -e" />
<group if="$(eval arg('camera_type_tel')=='d435')">
<node pkg="pkgxxx" type="grasp_d435.py" name="grasp" output="screen">
<remap from="/camera/rgb/image_raw" to="/camera/color/image_raw" if="$(eval arg('camera_type_tel')=='d435')"/>
</node>
</group>
<group if="$(eval arg('camera_type_tel')=='astrapro')">
<node pkg="pkgxxx" type="grasp_pro_new.py" name="grasp" output="screen"/>
</group>
步骤5、启动launch文件并实现机器人控制、抓取,新开一个终端,执行下面指令:
$roslaunch pkgduan teleop2grasp.launch
启动后,控制界面如下:
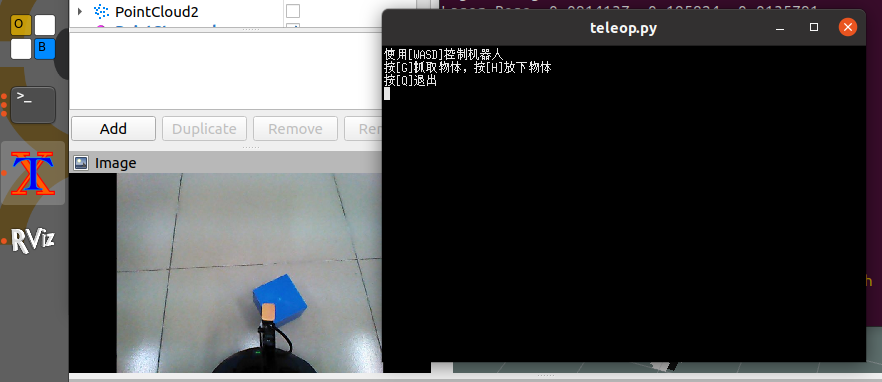
点击 图标,将遥控界面至于活动界面,通过WASD控制机器人移动和旋转,通过G抓取其前方的分米立方块,通过H放下立方块。
图标,将遥控界面至于活动界面,通过WASD控制机器人移动和旋转,通过G抓取其前方的分米立方块,通过H放下立方块。
步骤6、如何扩展,基本思路和方法:
通过rosrun rqt_graph rqt_graph可以查看的目前ROS的计算图如下(部分):
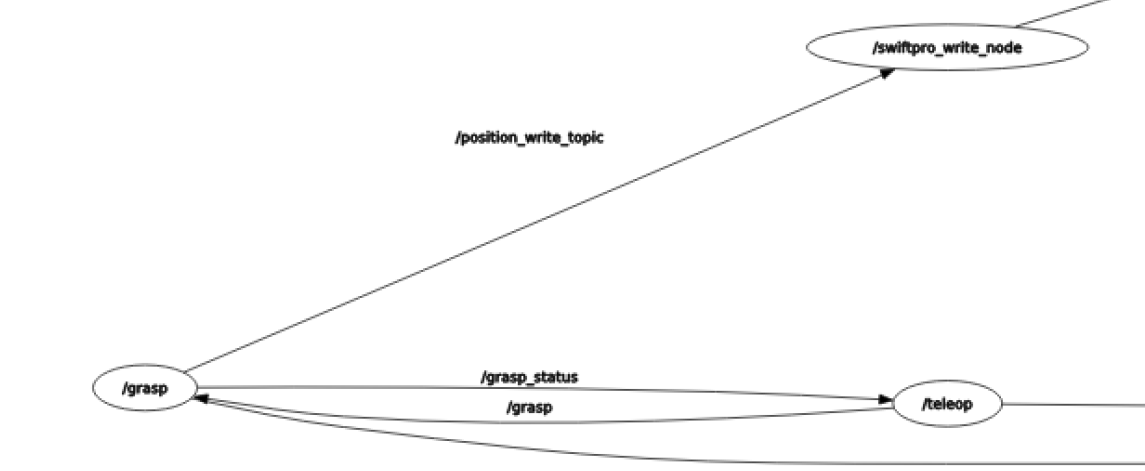
其中teloop节点对应的代码就是:teleop.py
grasp节点对应的代码就是:grasp_pro_new.py
修改上述两个节点,就可以实现更为复杂的功能。
例如,在teleop.py中增加更多的功能键,实现不同高度的放置(参考其中H功能键的代码扩展),
grasp_pub = rospy.Publisher('/grasp', String, queue_size=1)
...
# ch为按键
if ch == 'g':
if can_grasp:
msg=String()
msg.data='1'
grasp_pub.publish(msg)
can_grasp=False
speed = 0
turn = 0
elif ch == 'h':
if can_release:
msg=String()
msg.data='0'
grasp_pub.publish(msg)
can_release=False
speed = 0
turn = 0
上面的代码中,msg.data向/grasp话题发布的消息,该消息被grasp节点订阅,实现不同的功能
目前发布的消息只有"0","1";
例如,可以设置一个按键'k',发布消息"2",表示要放到第二层的高度。
这就交给各位同学,各显神通了!
再来看一下grasp_pro_new.py的核心代码(grasp节点):
self.sub2 = rospy.Subscriber(
'/grasp', String, self.grasp_cp, queue_size=1)
这说明,该节点从/grasp话题订阅消息,回调函数为self.grasp_cp,只要改该函数就可以增加功能,
def grasp_cp(self, msg):
if msg.data == '1':
# \u8ba2\u9605\u6444\u50cf\u5934\u8bdd\u9898,\u5bf9\u56fe\u50cf\u4fe1\u606f\u8fdb\u884c\u5904\u7406
self.sub = rospy.Subscriber("/camera/rgb/image_raw", Image, self.image_cb, queue_size=1)
self.is_found_object = False
rate = rospy.Rate(10)
times=0
steps=0
while not self.is_found_object:
rate.sleep()
times+=1
# \u8f6c\u4e00\u5708\u6ca1\u6709\u53d1\u73b0\u53ef\u6293\u53d6\u7269\u4f53,\u9000\u51fa\u6293\u53d6
if steps>=5:
self.sub.unregister()
print("stop grasp\n")
status=String()
status.data='-1'
self.grasp_status_pub.publish(status)
return
# \u65cb\u8f6c\u4e00\u5b9a\u89d2\u5ea6\u626b\u63cf\u662f\u5426\u6709\u53ef\u4f9b\u6293\u53d6\u7684\u7269\u4f53
if times>=30:
times=0
steps+=1
self.turn_body()
print("not found\n")
print("unregisting sub\n")
self.sub.unregister()
print("unregisted sub\n")
# \u6293\u53d6\u68c0\u6d4b\u5230\u7684\u7269\u4f53
self.grasp()
status=String()
status.data='1'
self.grasp_status_pub.publish(status)
if msg.data=='0':
# \u653e\u4e0b\u7269\u4f53
self.is_found_object = False
self.release_object()
status=String()
status.data='0'
self.grasp_status_pub.publish(status)
附文件源码:
视频讲解1:(如何扩展功能界面)
视频讲解2:(扩展功能)
。

