
2024年夺宝奇兵自动任务赛培训
上一节
下一节
2024年夺宝奇兵自动任务赛
竞赛规则:
道具图片:
要求:全自动,启动系统后选手不能再控制键盘、鼠标以及其它通讯设备控制spark机器人
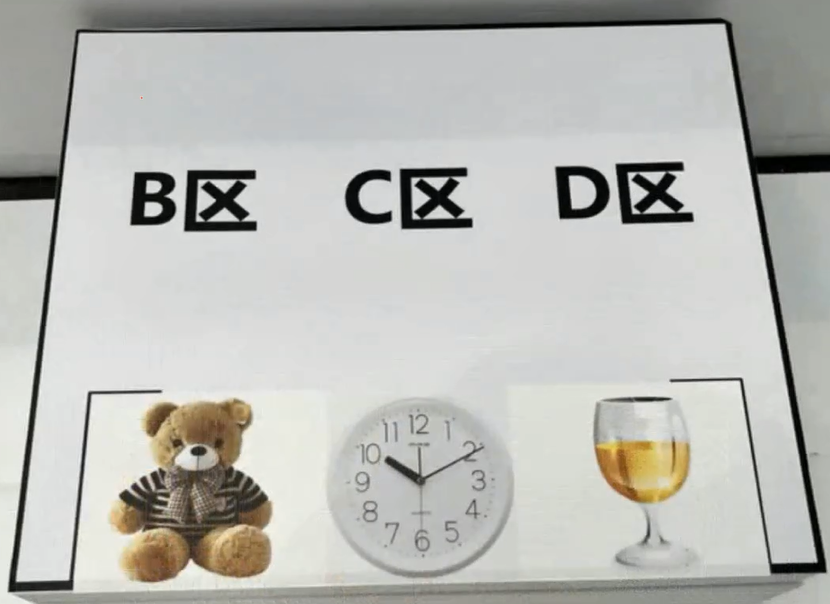
典型比赛场景:

(注意:实际的比赛场景,需要考虑光照)
启动launch文件(包含深度学习,针对spark_noetic版本)

