
1、SLAM基本原理
2、SLAM实验
实验目的:掌握基于激光雷达的移动机器人SLAM的基本步骤,理解launch文件的基本写法,认识栅格地图。
步骤1:开启机器人并进行连接
(0)如果机器人电量不足,请充电(用输出电压为19V充电器)
(1)开启机器人,记录其热点名称(spark-xxx)及IP地址(一般为10.42.0.1)
(2)启动笔记本或台式电脑,通过无线网卡连接机器人热点(spark-xxx)
(3)在笔记本或台式电脑上启动VNCViewer,通过机器人IP连接到机器人。
步骤2:
开启一个终端,执行以下指令
roslaunch spark_slam 2d_slam.launch
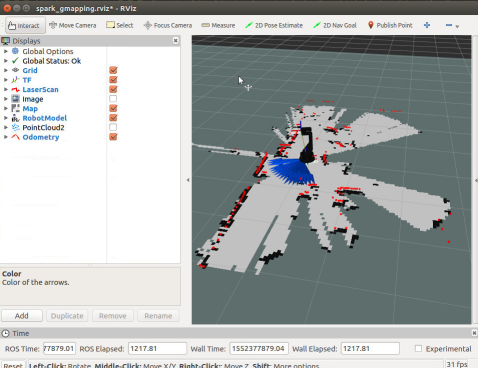
成功启动后,在rviz可视化界面可以看到类似上面的界面,其中,地图上红色点为激光雷达检测到物体的标识点。灰色为检测到的空地。黑色为障碍物的位置。
步骤3:遥控机器人移动
另开一个终端,执行下面指令:
rosrun spark_teleop keyboard_control.sh
通过键盘遥控机器人移动
观测步骤2中rviz界面的地图变化情况
步骤4:保存地图
新开一个终端,执行下面的指令
rosrun map_server map_saver -f mymap01
(注:其中,mymap01为地图的名字,请根据自己的喜好更改)
保存后通过ls可以看到mymap01.pgm和mymap01.yaml两个文件,
可以在文件管理器显示mymap01.pgm(图片(显示实验报告),通过cat mymap01.yaml显示地图的信息。写入实验报告。
步骤5:通过rqt_graph来显示ROS计算图
rosrun rqt_graph rqt_graph
把所看到的计算图截图,写入实验报告。
步骤6:查看并了解launch文件
新开一个终端,
roscd spark_slam
cd launch
cat 2d_slam.launch
显示2d_slam.launch文件,阅读该文件,并写入实验报告。
步骤7:建图比赛(选作)
每个小组控制一台机器人,对环境进行建图。规则:(1)要求操作员只看电脑屏幕(不看机器人)。(2)机器人碰到障碍物时停止建图(保存地图)。(3)地图范围最大的获胜。(对碰到障碍物的情形进行分析和思考)

