
栅格地图及其应用
1、栅格地图数据格式
在ROS中,栅格地图消息为nav_msgs/OccupancyGrid
通过指令rosmsg show nav_msgs/OccupancyGrid可以获得栅格地图格式如下:
$ rosmsg show OccupancyGrid
[nav_msgs/OccupancyGrid]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
nav_msgs/MapMetaData info
time map_load_time
float32 resolution
uint32 width
uint32 height
geometry_msgs/Pose origin
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
int8[] data
关于地图大小及精度:地图宽度为width栅格,高度为height栅格,精度为resolution (m/栅格)
关于地图原点:The origin of the map [m, m, rad]. This is the real-world pose of the
# cell (0,0) in the map.
即为栅格(0,0)在地图坐标系中的实际坐标(单位为m)
关于data:
The map data, in row-major order, starting with (0,0). Occupancy
# probabilities are in the range [0,100]. Unknown is -1.
(0表示空闲,白色;100表示占用,黑色)
栅格(cx,cy)在data中的编号ci的对应关系:ci=width*cy+cx
栅格地图元数据,可以通过以下指令获得:
获得地图元信息
rostopic echo /map_metadata -n 1
map_load_time:
secs: 1702601864
nsecs: 716249167
resolution: 0.0500000007451
width: 384
height: 384
origin:
position:
x: -10.0
y: -10.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
上述地图元素数据说明,栅格地图的宽度和高度都是384个栅格,
每个栅格(正方形)的边长(栅格分辨率)为0.05米。
这个分辨率也说明,移动机器人的定位精度不会超过0.05米。
此外,上述数据还说明,第(0,0)个栅格,也就是
第0行第0列的栅格,在地图坐标系下的坐标为(-10m,-10m,0m)
方向四元数(0,0,0,1)表示两个坐标系方向相同(第(0,0)栅格与地图坐标系方向一致)
关于地图数据的表示:
地图数据存放在data数组中,data数组是一个基类型为int8(及8位的整型,相当于
C语言中的char类型)的一维数组,一维数组可以存放二维数据,采用的是按
行为主序(row-major order),所谓按行为主序,就是先存放第1行,再
存放第2行,...,
栅格(cx,cy)在data中的编号ci的对应关系:ci=width*cy+cx
为了进一步理解行、列的概念,以及地图数据的存储(和上面的公式),我们
用以下代码来进行测试,
void mappub(void)
{
//cell: (cx,cy) data index ci=width*cy+cx
//(0,5) 5*width (1,5) 5*width+1
//(10,0) 10
map_.data.at(5*width) =0;
map_.data.at(6*width) =0;
map_.data.at(5*width+1) =0;
map_.data.at(6*width+1) =0;
map_.data.at(10) =0;
map_.data.at(11) =0;
map_publisher.publish(map_);
}
该代码执行后,对应地图如下图:
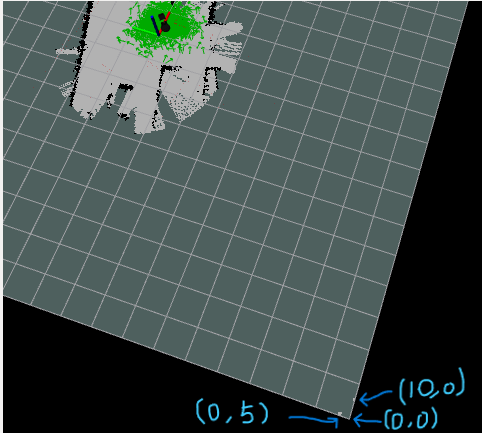
由此我们可以看到,前面所说的行,就是沿x轴方向,列则是y轴方向。
关于上述代码的补充说明,上述代码的map_为 nav_msgs::OccupancyGrid 类型,
显然,要获得其大小、分辨率及坐标原点,其表示方式为:
nav_msgs::OccupancyGrid map_;
int width=map_.info.width;
int height=map_.info.height;
float resolution=map_.info.resolution;
float ox=map_.info.origin.position.x;
float oy=map_.info.origin.position.y;
2、栅格地图构建
为了加深对上述栅格地图概念的理解,我们来通过程序构建一个栅格地图,
以夺宝奇兵比赛场地为例,在夺宝奇兵比赛中,机器人在一个3m*3m的封闭空间进行作业。
我们就假设地图大小为6m*6m,在其正中心的3m*3m区域为空闲,在此区域的边界厚度为2个栅格的部分为占用,其它部分为未知。分辨率设置为0.03m,坐标原点设置为(-3.0,-3.0,0),方向四元数为(0,0,0,1)。
核心代码如下:
/**
* 节点MapPubv1
* 从map话题发布nav_msgs/OccupancyGrid消息
地图大小为6m*6m,在其正中心的3m*3m区域为空闲,
在此区域的边界厚度为2个栅格的部分为占用,其它部分为未知。
分辨率设置为0.03m,坐标原点设置为(-3.0,-3.0,0),方向四元数为(0,0,0,1)
* 开发者:段琢华,duanzhuohua@163.com 2024-3-21
*/
#include "ros/ros.h"
#include "nav_msgs/OccupancyGrid.h"
//申明nav_msgs::OccupancyGrid消息类型
ros::Publisher map_pub;//发布者
nav_msgs::OccupancyGrid map_;
void mappub(void)
{
//cell: (cx,cy) data index ci=width*cy+cx
//(0,5) 5*width (1,5) 5*width+1
//(10,0) 10
map_.header.stamp=ros::Time::now();//当期时间;
map_.header.frame_id="map";
map_.info.width=int(6/0.03);//地图大小为6m*6m,分辨率设置为0.03m
map_.info.height=int(6/0.03);
map_.info.resolution=0.03;
map_.info.origin.position.x=-3.0;//坐标原点设置为(-3.0,-3.0,0)
map_.info.origin.position.y=-3.0;
map_.info.origin.position.z=0;
map_.info.origin.orientation.x=0;
map_.info.origin.orientation.y=0;
map_.info.origin.orientation.z=0;
map_.info.origin.orientation.w=1;
map_.data.resize(map_.info.width*map_.info.height);
map_.data.assign(map_.data.size(),-1);
int cx_low=int(1.5/0.03);
int cy_low=int(1.5/0.03);
int cx_len=int(3/0.03);
int cy_len=int(3/0.03);
int width=map_.info.width;
//(cx_low,cy_low)~(cx_low+cx_len,cy_low) the row cy_low
//(cx_low-1,cy_low-1)~(cx_low+cx_len+2,cy_low-1) the row cy_low-1
//(cx_low,cy_low+cy_len)~(cx_low+cx_len,cy_low+cy_len) the row cy_low+cy_len
//(cx_low-1,cy_low+cy_len+1)~(cx_low+cx_len+2,cy_low+cy_len+1) the row cy_low+cy_len+1
//(cx_low,cy_low)~(cx_low,cy_low+cy_len) the col cx_low
//(cx_low-1,cy_low-1)~(cx_low-1,cy_low+cy_len+2) the col cx_low-1
//(cx_low+cx_len,cy_low)~(cx_low+cx_len,cy_low+cy_len) the col cx_low+cx_len
//(cx_low+cx_len+1,cy_low-1)~(cx_low+cx_len+1,cy_low+cy_len+2) the col cx_low+cx_len+1
int cx,cy,ci;
for(cx=cx_low;cx<=cx_low+cx_len;cx++)
{//(cx_low,cy_low)~(cx_low+cx_len,cy_low) the row cy_low
cy=cy_low;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cx=cx_low-1;cx<=cx_low+cx_len+2;cx++)
{//(cx_low-1,cy_low-1)~(cx_low+cx_len+2,cy_low-1) the row cy_low-1
cy=cy_low-1;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cx=cx_low-1;cx<=cx_low+cx_len+2;cx++)
{//(cx_low,cy_low+cy_len)~(cx_low+cx_len,cy_low+cy_len) the row cy_low+cy_len
cy=cy_low+cy_len;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cx=cx_low-1;cx<=cx_low+cx_len+2;cx++)
{//(cx_low-1,cy_low+cy_len+1)~(cx_low+cx_len+2,cy_low+cy_len+1) the row cy_low+cy_len+1
cy=cy_low+cy_len+1;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
;;
for(cy=cy_low;cy<=cy_low+cy_len;cy++)
{//(cx_low,cy_low)~(cx_low,cy_low+cy_len) the col cx_low
cx=cx_low;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cy=cy_low-1;cy<=cy_low+cy_len+2;cy++)
{//(cx_low-1,cy_low-1)~(cx_low-1,cy_low+cy_len+2) the col cx_low-1
cx=cx_low-1;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cy=cy_low-1;cy<=cy_low+cy_len+2;cy++)
{//(cx_low+cx_len,cy_low)~(cx_low+cx_len,cy_low+cy_len) the col cx_low+cx_len
cx=cx_low+cx_len;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
for(cy=cy_low-1;cy<=cy_low+cy_len+2;cy++)
{//(cx_low+cx_len+1,cy_low-1)~(cx_low+cx_len+1,cy_low+cy_len+2) the col cx_low+cx_len+1
cx=cx_low+cx_len+1;
ci=width*cy+cx ;
map_.data.at(ci)=100;
}
//(cx_low+1,cy_low+1)~(cx_low+cx_len-1,cy_low+cy_len-1) :0 free
for(cx=cx_low+1;cx<=cx_low+cx_len-1;cx++)
for(cy=cy_low+1;cy<=cy_low+cy_len-1;cy++)
{
ci=width*cy+cx ;
map_.data.at(ci)=0;
}
map_pub.publish(map_);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "MapPubv1");
ros::NodeHandle n;
map_pub = n.advertise<nav_msgs::OccupancyGrid>("Map", 5);//初始化发布者对象
ros::Rate loop_rate(1);
//设置发布频率
while (ros::ok())
{
//计算并发布map
mappub();
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
构建(上述文件存放于simple_nodes包的src目录下,名字为MapPubv1.cpp):
修改CMakeLists.txt文件,
(1)增加对nav_msgs包的依赖,如下
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
turtlesim
tf
nav_msgs
)
(2)在CMakeLists.txt文件末尾增加如下两行,
add_executable(MapPubv1 src/MapPubv1.cpp)
target_link_libraries(MapPubv1 ${catkin_LIBRARIES})
转到工作区,利用catkin_make指令构建,成功后,
执行rosrun simple_nodes MapPubv1
在rviz中增加map话题,增加Axes,效果如下:
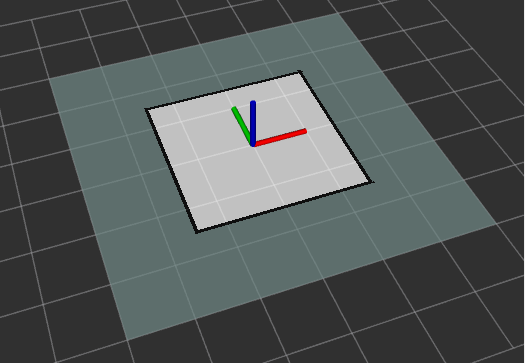
注:上述地图可以作为“夺宝奇兵”大赛的地图。
扩展训练:编写程序,制作更为复杂的地图。
3、栅格地图编辑
问题:给定地图上的两个点(地图坐标系下)p1,p2,在栅格地图上建立p1到p2两点的虚拟墙
(p1,p2连线所经历的栅格设置为占用)
基础算法:Bresenham 算法
参考:https://zhuanlan.zhihu.com/p/507645801
算法的C语言实现:
void Breseham_Line(int x1, int y1, int x2, int y2)
{
int dx = x2 - x1;
int dy = y2 - y1;
int ux = ((dx > 0) << 1) - 1;//x的增量方向,取或-1
int uy = ((dy > 0) << 1) - 1;//y的增量方向,取或-1
int x = x1, y = y1, eps;//eps为累加误差
eps = 0;dx = abs(dx); dy = abs(dy);
if (dx > dy)
{
for (x = x1; x != x2; x += ux)
{
printf("%d %d\n",x,y);
eps += dy;
if ((eps << 1) >= dx)
{
y += uy; eps -= dx;
}
}
}
else
{
for (y = y1; y != y2; y += uy)
{
printf("%d %d\n",x,y);
eps += dx;
if ((eps << 1) >= dy)
{
x += ux; eps -= dy;
}
}
}
}
例如:可以通过调用Breseham_Line(0,0,8,3);来在栅格(0,0)到(8,3)之间画一条直线。
示例代码,MapBubv2.cpp,从Map订阅栅格地图(注:可以改为从地图服务获取地图),
添加一条直线,然后发布新的地图。
/**
* 节点MapPubv2
* usage: MapBupv2 cx1 cy1 cx2 cy2
从map话题 subscribe nav_msgs/OccupancyGrid消息
add a line from(cx1,cy1) to (cx2,cy2) to map
* 开发者:段琢华,duanzhuohua@163.com 2024-3-21
*/
#include "ros/ros.h"
#include "nav_msgs/OccupancyGrid.h"
//申明nav_msgs::OccupancyGrid消息类型
void Breseham_Line(int x1, int y1, int x2, int y2);
void map_Callback(const nav_msgs::OccupancyGrid::ConstPtr& msg);
ros::Publisher map_pub;//发布者
nav_msgs::OccupancyGrid map_;
int cx1,cy1,cx2,cy2;
void map_Callback(const nav_msgs::OccupancyGrid::ConstPtr& msg)
{
map_=*msg;
Breseham_Line(cx1,cy1,cx2,cy2);
}
void Breseham_Line(int x1, int y1, int x2, int y2)
{
int dx = x2 - x1;
int dy = y2 - y1;
int ux = ((dx > 0) << 1) - 1;//x的增量方向,取或-1
int uy = ((dy > 0) << 1) - 1;//y的增量方向,取或-1
int x = x1, y = y1, eps;//eps为累加误差
eps = 0;dx = abs(dx); dy = abs(dy);
if (dx > dy)
{
for (x = x1; x != x2; x += ux)
{
//printf("%d %d\n",x,y); 此处改为在栅格地图上输出
int width=map_.info.width;//
int ci=width*y+x;
map_.data.at(ci)=100;
eps += dy;
if ((eps << 1) >= dx)
{
y += uy; eps -= dx;
}
}
}
else
{
for (y = y1; y != y2; y += uy)
{
//printf("%d %d\n",x,y);
int width=map_.info.width;//
int ci=width*y+x;
map_.data.at(ci)=100;
eps += dx;
if ((eps << 1) >= dy)
{
x += ux; eps -= dy;
}
}
}
map_pub.publish(map_);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "MapPubv2");
if (argc<5){
ROS_INFO("Usage rosrun simple_nodes MapPubv2 cx1 cy1 cx2 cy2.");
//
return -1;
}
ros::NodeHandle n;
cx1 = atoi(argv[1]);
cy1 = atoi(argv[2]);
cx2 = atoi(argv[3]);
cy2 = atoi(argv[4]);
ros::Subscriber sub = n.subscribe("Map", 5, map_Callback);
map_pub = n.advertise<nav_msgs::OccupancyGrid>("Map", 5);//初始化发布者对象
ros::Rate loop_rate(1);
//设置发布频率
while (ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}

