
2020-03-10上传
(勘误:P18,页面中的sin(π/3)应该为sin(π/6),感谢陈林同学的指正)
(注:视频中课件文字不够清晰,请结合上面的pdf文件观看)
视频1:平移变换与简单的旋转变换
(视频1已发现的BUG:1、如果手机播放没有声音,请带上耳机;或者请在电脑上观看;2、"tranform"应为“transform”,感谢段韬同学的指正)
视频2:旋转变换、齐次变换(2020-03-08)35分57秒
视频3:方向的其它表示方法
(视频3已发现BUG:1分25秒处,应为gamma弧度(误读成了gamma度))
视频4:基于Eigen3的坐标变换编程
示例程序:transform_tut.cpp
(向量点乘、叉乘、矩阵乘法、转置、逆矩阵、坐标系、坐标表示、变换、齐次变换矩阵求逆)
电子科技大学中山学院2020春季课程
第二周直播(部分对应 第二周答疑.pdf)2020-3-19
1、坐标系
ROS采用右手坐标系,如图1所示。由于本课程主要基于ROS介绍移动机器人自主导航,所以按照ROS的惯例采用右手坐标系。
在右手坐标系中,食指指向x轴的正方向,中指指向y轴的正方向,拇指指向z轴的正方向。
绕某个坐标轴的旋转方向根据如图2所示的右手法则定义:如果让右手的拇指沿某一坐标轴的正方向,那么其它四个手指旋绕的方向为旋转的正方向。
例如,对于移动机器人而言,x轴正方向指向机器人前进的方向,y轴的正方向指向(前进方向的)左边,z轴的正方向指向上方。围绕z轴的正方向的旋转是逆时针的。
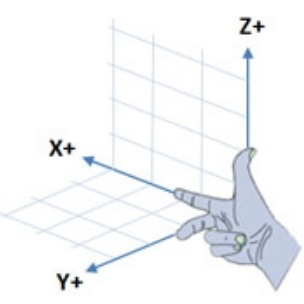

图1 右手坐标系 图2 右手法则
2、坐标与位姿
坐标给出某一点在坐标系中的位置,位姿包含位置和方向(机器人的朝向)。参照ROS的惯例,位置和长度的单位采用米(m),时间采用秒(s),线速度采用(m/s),角度采用弧度(rad),角速度采用(rad/s)。
位姿(pose):位姿包含位置(position)和方向(orientation)(如机器人或某个部件的朝向)。
位置:通过坐标表示。
方向:通过旋转矩阵、四元数等方式表示(将在后面介绍)
坐标:在三维空间中,坐标利用一个3x1的列向量表示。坐标总是相对于某个坐标系,当存在多个坐标系时,我们通过在点的左上角书写坐标系的名称来表示,如图3。
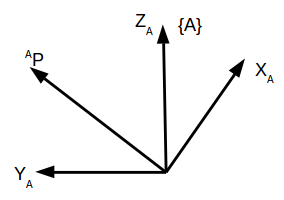
图3 坐标及其表示
3、坐标变换
平移变换:
平移(Translation):设某点P在坐标系{B}中的坐标表示为BP。坐标系{B}与坐标系{A}具有相同的方向,即{B}相对于{A}只有平移,其平移变换通过向量表示,
是{B}的原点
在坐标系A中的坐标。
平移变换可以通过向量的加法实现,如图4所示,=
+
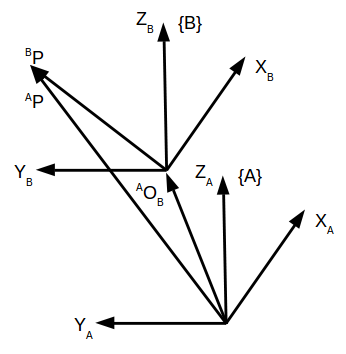
图4 平移变换
旋转(Rotation):可以通过旋转矩阵ARB来表示坐标系{B}相对于坐标系{A}的方向。
图5显示的坐标系{B}是这样获得的:最初{B}与{A}重合,然后{B}绕{A}的Z轴旋转π/6。
旋转的右手法则:如果让右手的拇指沿某一坐标轴的正方向,那么其它四个手指旋绕的方向为旋转的正方向。
旋转矩阵ARB表示坐标系B相对与坐标系A的旋转。
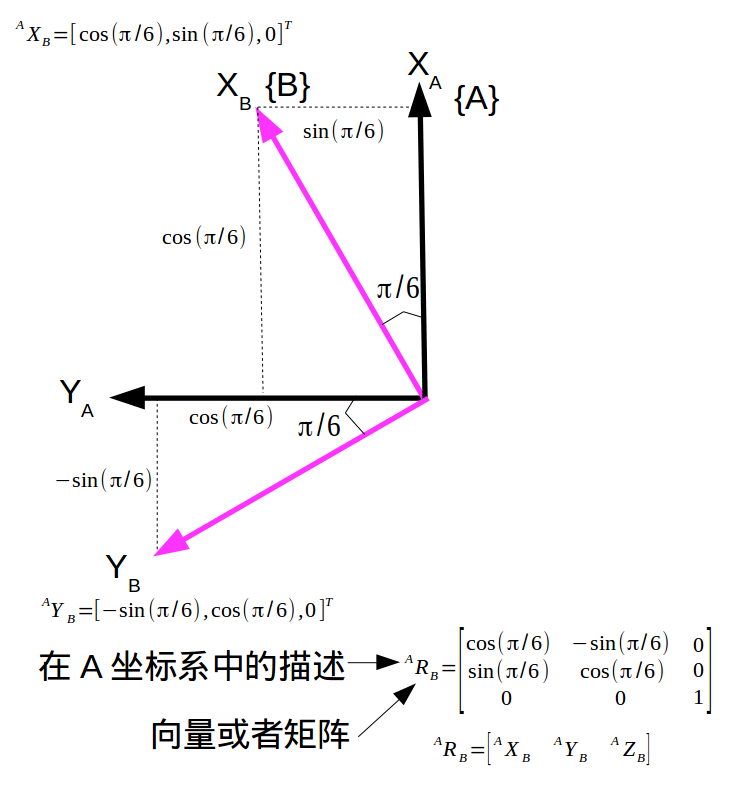
图5 旋转矩阵示例
该例显示:旋转矩阵ARB 的列向量是坐标系B的X, Y, Z 坐标轴的单位向量在坐标系A中的表示,这一结论将在后面予以证明。
可以看出,该矩阵的第一个列向量(cos(π/6) sin(π/6) 0)TT正是B坐标系在X方向单位向量在A中的表示。
在获得坐标系B相对于坐标系A的旋转矩阵之后,可以通过以下公式将坐标系B中某一点的坐标变换到坐标系A中。
Ap=ARB *Bp
例如:设Bp=(1 0 0)T
Ap=ARB *Bp=(cos(π/6) sin(π/6) 0)T
设坐标系{B}与坐标系{A}的原点相同,如图6,某点P在坐标系{A}中可以表示为:
P=(XA YA ZA)AP,其中XA,YA ,ZA分别为坐标系{A}的X,Y,Z轴的单位向量
P在坐标系{B}中可以表示为:
P=(XB YB ZB)BP,因此:
(XA YA ZA)AP= (XB YB ZB)BP
(XA YA ZA)T(XA YA ZA)AP=(XA YA ZA)T (XB YB ZB)BP,注意到(XA YA ZA)T(XA YA ZA)为单位矩阵,因而有
Ap=ARB Bp
其中:
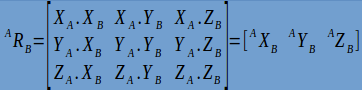
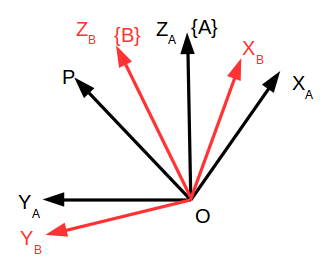
图6 旋转矩阵

旋转矩阵有以下特点:
旋转矩阵是正交矩阵(Orthogonal Matrix)(就是说:其逆矩阵为其转置矩阵)
其行列式的值为1
每个列向量(及行向量)都是单位向量
三个列向量相互正交
三个行向量相互正交
坐标变换:若坐标系{B}相对与坐标系{A}既有旋转又有平移,可以引入坐标系{B'},{B'}的原点与{B}的原点重合,{B'}的方向与{A}的方向一致。
有:B'P=B'RBBP, AP=B'P+AOB'
由于OB'=OB,且 B'RB=ARB,所以
坐标变换可以通过以下公式实现:
AP=ARBBP+AOB
注意到AP和BP是同一个点P在坐标系{A}和{B}的坐标(并不是两个不同的点,只是一个点在不同坐标系下的描述)
齐次变换(homogeneous transform):为了把包含旋转和平移两类变换表示成矩阵形式,通常采用4X4的变换矩阵ATB,同时把3X1坐标扩展为4X1的向量:
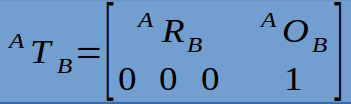
这样,变换可以表示为:
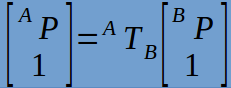
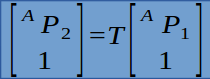
变换运算(transformation operators):齐次变换不仅可以用于计算同一个点在不同坐标系中的坐标,还可以作为一个运算,此时,同一坐标系下的点P1经过齐次变换T后,产生一个新的点P2:
总结:齐次变换矩阵有三个作用:(1)可以表示坐标系之间的相对位姿,(2)用于坐标变换,(3)作为一种运算符
齐次变换给出了一种紧凑的书写方法,把旋转和平移变换用统一的矩阵形式表示,可以很好地表示多个坐标系之间的变换关系。但在实际的计算中,还是会采用旋转加平移的方法(以减少多余的乘以0的计算)。
参考:
[1]https://github.com/cse481sp17/cse481c/wiki/Lab-14%3A-Odometry-and-rotations
[3]《计算机视觉:一种现代方法(中文版)》,Computer Vision: A Modern Approach. David A. Forsyth, Jean Ponce 著. 林学訚,王宏译
[4]《视觉SLAM十四讲》从理论到实践,高翔、张涛著
[5]Introduction to Robotics:Mechanics and control. Third Edition. John J. Craig (Chapter 2 Spatial descriptions and transformations(p41-)
[6]Graphics Gems IV. Edited by Paul S. Heckbert. III.5 Euler Angle Conversion(p222-)
[7]http://eigen.tuxfamily.org/dox/group__TutorialGeometry.html


![[2]https://cloud.githubusercontent.com/assets/1175286/25162364/f754fce2-2476-11e7-9b78-8c7699c3a22c.png](https://cloud.githubusercontent.com/assets/1175286/25162364/f754fce2-2476-11e7-9b78-8c7699c3a22c.png){kind=link}