任务四:ABB机器人完成喷涂任务(实践操作)
上一节
下一节
任务四:ABB机器人完成喷涂任务(实践操作)

一、本课简介
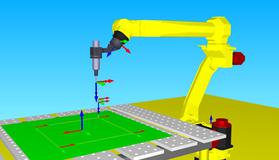
本次课老师带领同学们一起建立ABB机器人完成工件盒直线喷涂任务的工作站,并且对ABB机器人的喷涂工作进行目标点轨迹规划和编程示教,最后通过机器人的单步运行和全速运行来执行工件盒直线喷涂的任务,完善ABB机器人完成工件盒直线喷涂任务的设计方案。
通过调用ABB机器人、智能喷枪和5个边长为80mm(总长为400mm)的工件盒工件的3D模型,逐步建立ABB机器人完成工件盒喷涂任务的工作站,并且调试好参考坐标系的位置;
为机器人添加六个主要的目标点:home→准备喷涂→开始喷涂→喷涂拐点→完成喷涂→结束喷涂;
应用MOVL和MOVJ指令,对上述六个目标点进行示教编程。
二、本课作业:
根据视频中最后一个页面中给出的ABB机器人完成工件盒喷涂任务的相关参数,建立机器人工作站,并实现ABB机器人完成工件盒的直线喷涂任务。

