任务一:ESTUN机器人完成轴承工件搬运任务(任务分析)
上一节
下一节
任务一:ESTUN机器人完成轴承工件搬运任务(任务分析)

一、本课简介
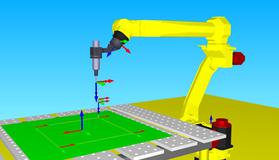
本次课老师带领同学们一起分析ESTUN机器人完成轴承工件搬运任务的全过程,讲解ESTUN机器人搬运工作站的建设情况,同时在参考坐标系下,对机器人进行目标点的轨迹规划和示教编程,以便让同学们掌握先进的机器人应用解决方案。
通过网站www.robodk.com的界面,下载ESTUN机器人完成轴承工件搬运任务所需要的3D模型,建立机器人、工具和工件的模型库;
讲解ESTUN机器人完成轴承工件搬运任务——工作站的建设方案和三大坐标系的设置方法;
为实现ESTUN机器人完成轴承工件搬运任务,进行必要的轨迹规划和示教编程方案设计。
二、本课作业:
机器人搬运轴承的水平位移是多少?
机器人抓取轴承时为何要添加延时?

