
第二节 工业机器人的应用实例
一、切削加工机器人
切削加工机器人是用于自由曲面打磨和抛光的加工设备,它包括机器人本体、控制柜和工业控制计算机三大部分。
图8-13 切削加工机器人原理图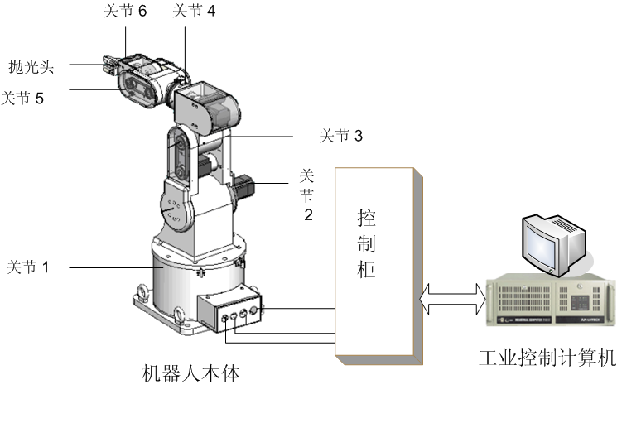
图8-13 切削加工机器人原理图

图8-14 机器人的操作界面
二、搬运机器人
搬运机器人主要完成物料的传送工作和机床上下料。
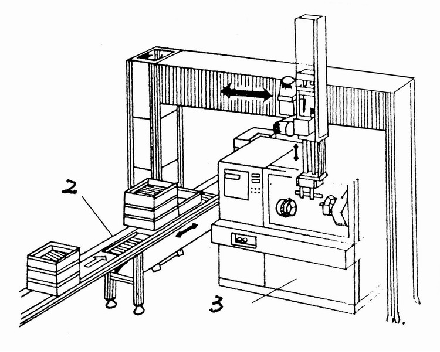
图8-15 机床上下料机器人
图8-16 引入移动机器人的生产线
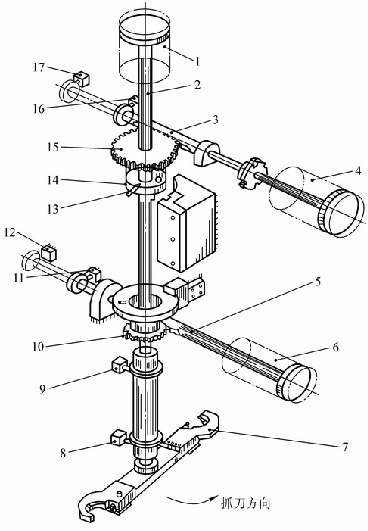
图8-17 加工中心的换刀机器人
1、4、6—气缸 2—手臂主轴 3、5—轴 7—手爪 8、9、11、12、16、17—行程开关
10、15—齿轮 13—柱销 14—圆盘
三、装配机器人
装配机器人可以实现对复杂产品的自动装配。
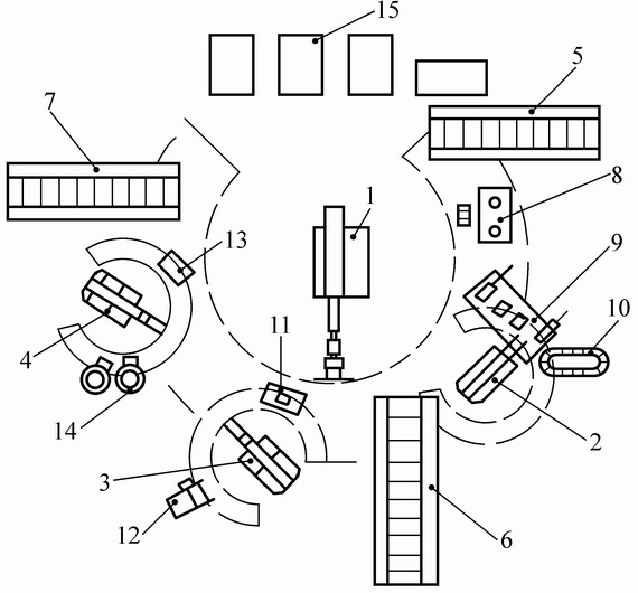
图8-18 带有机器人的装配系统
1—搬运机器人 2、3、4—装配机器人 5、6、7—传送带8—缓冲站
9、11、13—装配工作台 10—圆盘传送带 12—螺栓料仓 14—振动料槽 15—控制器
四、焊接机器人
焊接机器人是机器人的主要用途之一,按焊接作业的不同分为点焊和弧焊作业。
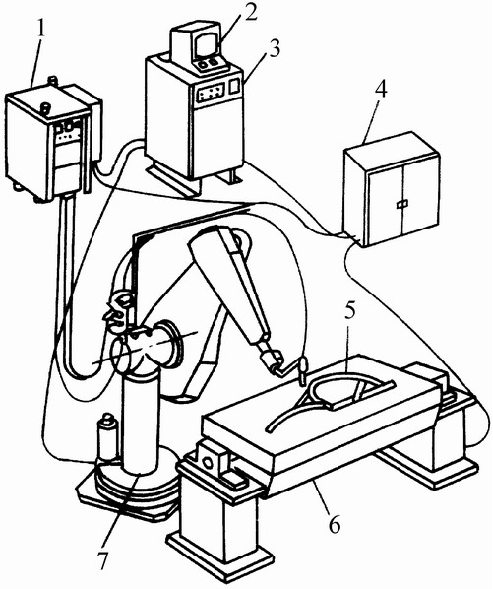
图8-19 焊接机器人
1—焊接电源 2—显示器 3—机器人控制装置 4—夹具控制装置 5—工件 6—焊接夹具 7—机器人
五、其它用途的机器人
喷漆机器人能够避免危害工人健康,提高喷涂质量和经济效益,在喷漆作业中的应用日趋广泛。由于喷漆机器人具有编程和示教再现能力,因此它可适应各种喷漆作业。
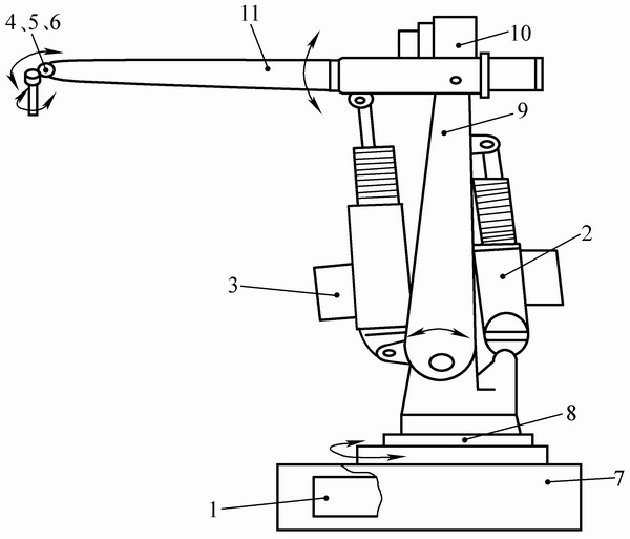
图8-20 喷漆机器人
1、2、3、4、5、6—电-液饲服驱动装置 7—机座 8—回转盘
9—垂直臂 10—电-液饲服阀 11—俯仰臂

