
第八章 工业机器人
第一节 概 述
一、工业机器人的定义
所谓“机器人” (Robot)就是一种自动装置,它能完成通常由人才能完成的工作。在工业领域内应用的机器人我们称为工业机器人。
通常对工业机器人的定义是:工业机器人是一种能模拟人的手、臂的部分动作, 按照预定的程序、轨迹及其它要求, 实现抓取、搬运工件或操作工具的自动化装置。
二、工业机器人的组成
▲组成——一般由执行机构、控制系统、驱动系统等三部分。
▲执行机构——是一种具有和人手臂有相似的动作功能,可在空间抓放物体或执行其它操作的机械装置,通常包括机座、手臂、手腕和末端执行器。
▲控制系统——用来控制机器
人的执行机构按规定要求
动作。
▲驱动系统——按照控制系统
发出的控制指令将信号放大,驱动执行机构运动的传动装置。
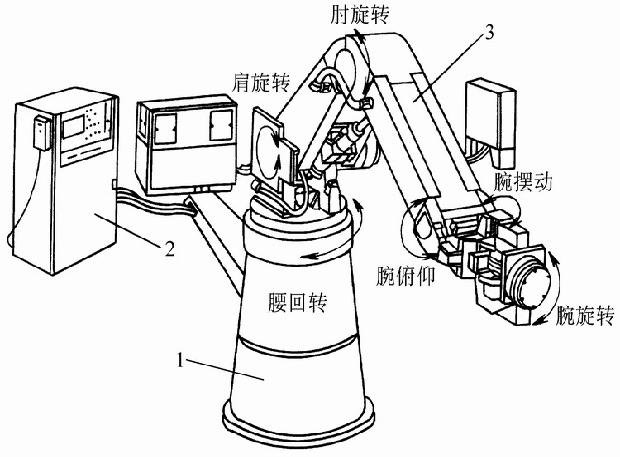
图8-1 工业机器人的组成
1—机座 2—控制系统 3—执行机构
三、工业机器人的分类
▲分类——按坐标形式、控制方式和信息输入方式等。
▲按坐标形式—即执行机构的手臂在运动时所取的参考坐标系的形式。
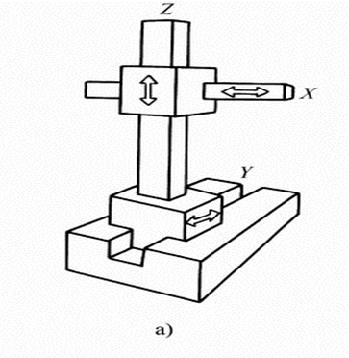
——直角坐标机器人
优点:位置精度最高,控制无耦合,比较简单,避障性好。
缺点:结构庞大,动作范围小,灵活性差。


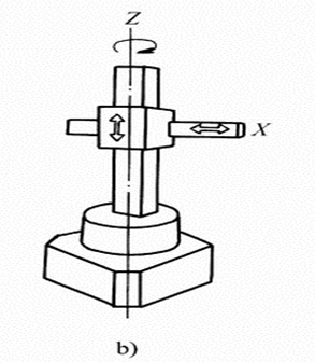
——圆柱坐标机器人
优点:位置精度较高,控制简单,避障性好。
缺点:结构庞大。
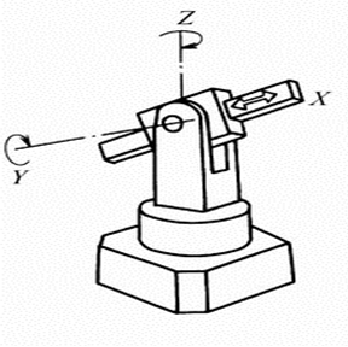
——极坐标机器人
优点:占地面积小,结构紧凑 ,位置精度尚可,控制简单,避障性好。
缺点:存在平衡问题。

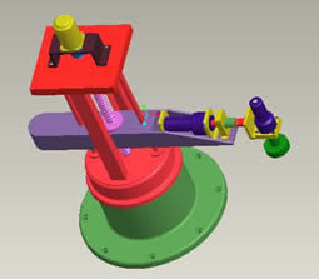
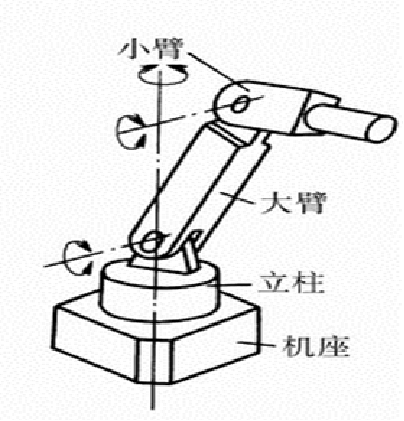
——关节坐标机器人
优点:工作范围大,动作灵活,避障性好。
缺点:位置精度较低,存在平衡问题,控制耦合比较复杂。

▲按控制方式分
——点位控制(Point to Point) 机器人
其运动为空间点到点之间的直线运动,不涉及两点之间的移动轨迹,只在目标点处控制机器人末端执行器的位置和姿态。这种控制方式简单,适用于上下料、点焊等作业。
——连续轨迹控制(Continuous Path)机器人
其运动轨迹可以是空间的任意连续曲线。机器人在空间的整个运动过程都要控制,末端执行器在空间任何位置都可以控制姿态。
▲按信息输入方式分
——人操作机械手 是一种由操作人员直接进行操作的具有几个自由度的机械手。
——固定程序机器人 按预先规定的顺序、条件和位置,逐步地重复执行给定的作业任务的机械手。
——可变程序机器人 它与固定程序机器人基本相同,但其工作次序等信息易于修改。
——程序控制机器人 它的作业任务指令是由计算机程序向机器人提供的,其控制方式与数控机床一样。
——示教再现机器人 这类机器人能够按照记忆装置存储的信息来复现由人示教的动作。其示教动作可自动地重复执行。
——智能机器人 采用传感器来感知工作环境或工作条件的变化,并借助其自身的决策能力,完成相应的工作任务。
四、工业机器人的发展趋势
(1)提高工作速度和运动精度,减少自身重量和占地面积。
(2)加快机器人部件的标准化和模块化,将各种功能(回转、伸缩、俯仰、摆动等)机械模块与控制模块、检测模块组合成结构和用途不同的机器人。
(3)采用新型结构,如微动机构、多关节手臂、类人手指、新型行走机构等,以适应各种作业需要。
(4)研制各种传感检测装置,如视觉、触觉、听觉和测距传感器等,来获取有关工作对象和外部环境的信息,使其具有模式识别的能力。
(5)利用人工智能的推理和决策技术,使机器人具有问题求解、动作规划等功能。
四、工业机器人的发展趋势








