
1.文件管理窗口
其他窗口→FileManager→回车,进入文件管理窗口,如图12.48所示。文件管理窗口有以下几个选项: Directory(子目录),Program(程序),Program Module(程序模块),System Module(系统模块),功能键Up (使屏幕回到上一层子目录)。
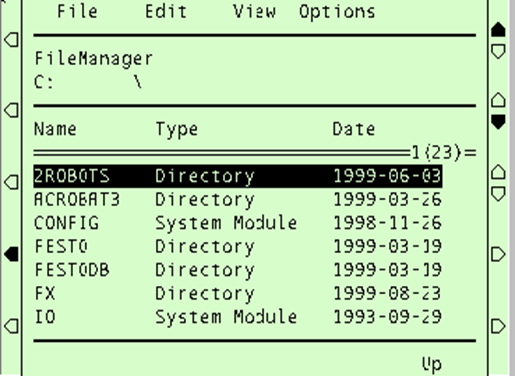
图12.48 文件管理窗口
2. 文本编辑窗口
在机器人操作中,字母或字符等输入,通过机器人文本编辑窗口进行,如图12.49所示。
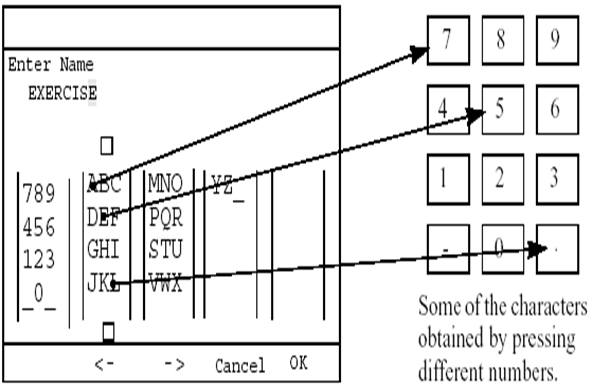
图12.49 文本编辑窗口
3. 格式化磁盘
其他窗口--->FileManager --->回车--->菜单键Options --->1 Format… --->(切换键--->回车---->使用文本编辑窗口定义名称--->OK---->切换键)--->选择格式化磁盘flp1 --->OK
Format一张盘片需一分钟。操作时注意不要Format除flp1以外任何盘片。机器人备份软盘尽量使用机器人进行Format。括号内操作是给需要Format的软盘作卷标,如果无需卷标可以不操作。
4. 建立子目录
其他窗口---> FileManager --->回车---> 使用菜单键View 选择所建子目录盘---> 使用光标移动键与回车键选择所建子目录位置---> 菜单键File --->1 New Directory… --->出现默认名--->回车--->程序文本编辑窗口输入子目录名--->OK--->OK
5. 复制(Copy)
其他窗口--->FileManager --->回车--->使用菜单键View 选择所需复制文件盘--->使用光标移动键与回车键选择所需复制文件位置--->菜单键File --->3 Copy… --->(回车--->通过文本编辑窗口改名--->OK)--->切换键--->功能键Unit选择存储单元--->使用光标移动键与回车键选择存储位置--->O
6. 移动(Move)
其他窗口--->FileManager --->回车--->使用菜单键View 选择所需移动文件盘--->使用光标移动键与回车键选择所需移动文件位置--->菜单键File --->4 Move… --->(回车--->通过文本编辑窗口改名--->OK)--->切换键--->使用光标移动键与回车键选择存储位置--->OK
文件只能在同一存储单元中移动,不同存储单元只能使用复制。
7. 重命名(Rename)
其他窗口--->FileManager --->回车--->使用菜单键View 选择所需重命名文件盘--->使用光标移动键与回车键选择所需重命名文件位置--->菜单键File --->2 Rename… --->回车--->通过文本编辑窗口改名--->OK--->OK
8. 删除(Delete)
其他窗口--->FileManager --->回车--->使用菜单键View 选择所需删除文件盘--->使用光标移动键与回车键选择所需删除文件位置--->删除键-->OK

