
1. 系统备份
系统应用软件的不完整将使机器人发生故障后的恢复十分困难!一定要按以下步骤做好系统备份。如图所示的12.47,进入服务窗口的其他窗口,选择Service,点击回车,进行系统备份。
系统备份:在菜单键File --->3 Backup…--->回车--->功能键Unit选择存储单元--->功能键New Dir 建立存储子目录--->功能键OK确认建立新子目录--->功能键OK确认存储路径--->功能键OK确认储存。
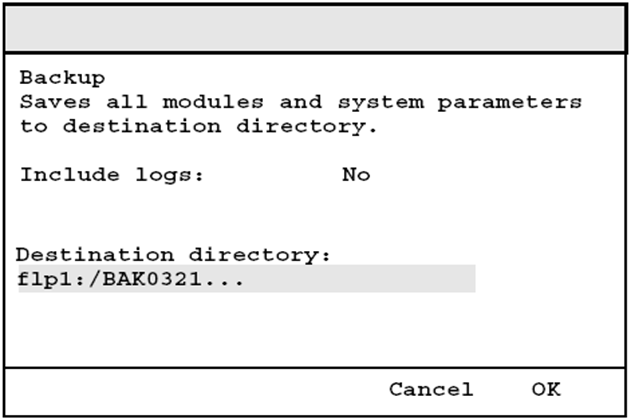
图12.47 系统备份窗口
2. 系统恢复
进入服务窗口: 其他窗口→Service→回车
恢复系统: 菜单键File→4 Restore…→回车→选择路径,将光标移至储存的子目录→功能键OK确认存储路径→功能键OK确认恢复→输入初始密码007→功能键OK确认。
3. 系统冷启动
系统冷起动使系统清盘,系统硬件全面自检。
Warm-Start:其他窗口--->Service --->回车--->菜单键File ---> Restart… --->回车--->功能键OK
C-Start:其他窗口--->Service --->回车--->菜单键File--->Restart… --->回车--->输入数字键1,3,4,6,7,9--->功能键C-Start
X-Start:其他窗口--->Service --->回车--->菜单键File ---> Restart… --->回车--->输入数字键1,5,9--->功能键X-Start
4. 标定机器人零位
操纵机器人至零位:以单轴运动方式操纵机器人。将机器人各个轴移至标记位置。
进入机器人服务窗口:其他窗口--->Service --->回车
标定机器人:菜单键View --->3 Calibration --->菜单键Calib --->1 Rev. Counter Update… --->功能键All --->OK--->OK
机器人各轴标定尽量同时进行,必须做到先二轴后三轴,先五轴后六轴。

