
输入输出信号
上一节
下一节
1.输入输出窗口
输入输出窗口如图12.45所示,在输入输出窗口或编程窗口不能更改或定义输入输出信号,所有操作只能在系统参数中进行。窗口显示所有用户信号,对D0信号可以手动用功能键赋值1或0。当手动对机器人输出信号赋值时,与机器人配合的外围设备可能会运动,注意安全!
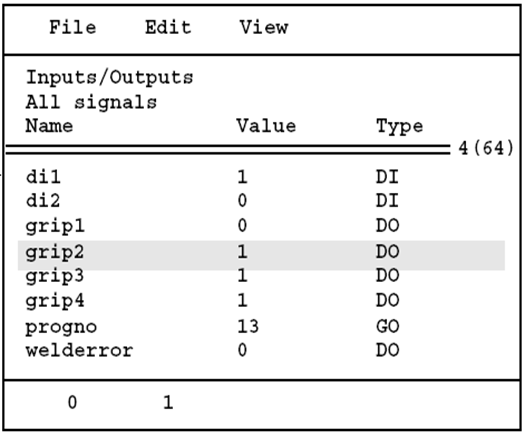
图12.45 输入输出窗口
2. 定义I/O信号板
进入系统参数窗口的其他窗口选择System Parameters点击回车,进入I/O单元窗口,如图12.46所示。点击菜单键Topics选择IO Signals下的菜单键Types,选择1 Units。用功能键Add增加新I/O板. 用删除键可删除光标所指向的I/O板。
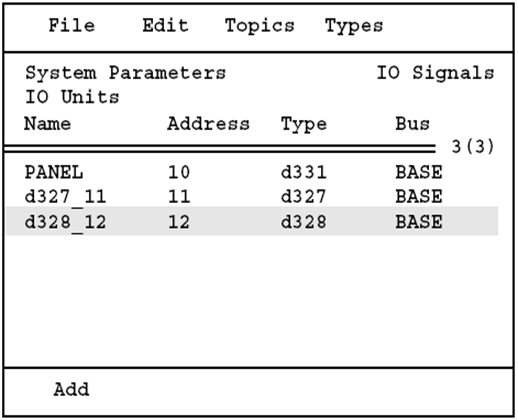
图12.46 I/O单元窗口
3. 定义或更改用户信号
进入系统参数窗口的其他窗口,选择System Parameters,点击回车,进入用户信号窗口;选择菜单键Topics下的IO Signals,选择菜单键Types 点击2 User Signals。用功能键Add增加新I/O信号。用删除键可删除光标所指向的I/O信号。将光标移至所选信号按回车键,可以更改当前信号数据。(定义信号名等)。
4. 系统热启动
机器人系统参数中,针对I/O信号的任何修改,必须进行系统热启动,使其有效。(机器人会有提示)。进入系统参数窗口的其他窗口,选择System Parameters 点击回车,进入界面,选择菜单键File-下的Restart…,点击回车,选择功能键OK确认,即可实现热启动。

