
1. 启动程序
将机器人操作模式选择器置于自动生产模式,示教器出现如图12.30所示的界面,按功能键OK进入生产窗口。
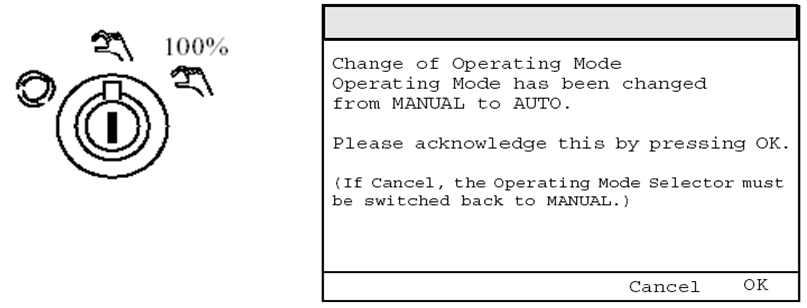
图12.30 机器人操作模式选择及界面信息
(1)生产窗口界面
机器人的生产窗口由窗口标题(Window title)、机器人速率(Robot velocity)、程序运行指针(Program pointer)、程序清单(Program list)、程序名称(Program name)、运行模式(Running mode)、程序运行状态(Program status)和运行速率调整(Adjusted velocity)组成,如图12.31所示。
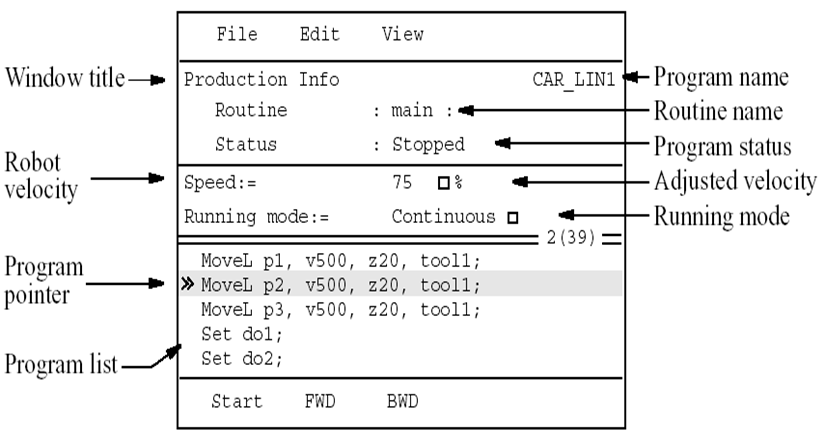
图12.31 机器人生产窗口
窗口标题(Window title):显示屏显示当前处在生产窗口,其内容不会变化,“Production Info”。机器人速率(Robot velocity):显示屏显示机器人当前运行速度速率标的,其内容不会变化,“Speed:=”。
程序运行指针(Program pointer):程序运行指针(简称PP)至关重要,它指示出一旦启动程序,程序将从哪里起执行。如果程序需要重新初始化,必须将程序运行指针移至主程序第一行。在当前窗口选择菜单键Edit,选择Start from Beginning点击OK确认。
程序清单(Program list):显示屏显示机器人当前运行的程序清单,可读出即将运行的指令。程序名称(Program name):显示屏显示机器人当前运行的程序名称。
运行模式(Running mode):显示屏显示机器人当前运行模式。如果需要更改,利用导航键中的List键切换到窗口的上半部,再将光标移至运行模式,此时在功能键上出现“Continuous”与“Cycle”选项,选择相应运行模式。
Continuous连续运行模式,当机器人执行完主程序最后一行后,自动再从第一行开始执行。
Cycle单循环运行模式,当机器人执行完主程序最后一行,自动停止。
程序运行状态(Program status):显示屏显示机器人当前运行状态,Stopped(机器人待命状态),Running(机器人正在运行程序)。
运行速率调整(Adjusted velocity):显示屏显示机器人当前运行速率,以百分比表示,如图12.32所示。
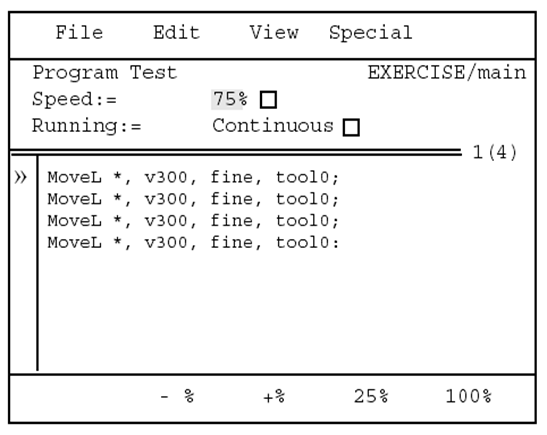
图12.32 机器人运行速率
(2)程序运行
在生产窗口,功能键上显示“Start”、“FWD”与“BWD”三种选项。可按相应功能键启动机器人。Start表示连续执行程序,FWD为单步正向执行程序,BWD为单步逆向执行程序。
(3)停止程序运行
按下停止键即停止机器人程序的运行,停止键如图12.33所示。注意:正常情况下应该用这种方法停止机器人程序的运行,不要靠其他方式强行终止运行。
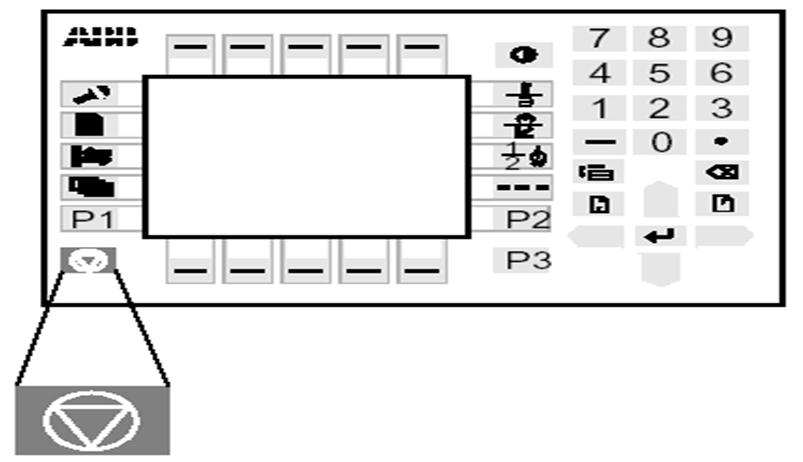
图12.33 停止机器人程序运行
2. 故障信息
无论何时何种故障,一旦发生,机器人系统会立即弹出故障信息窗口,如图12.34所示。每个故障信息都带有故障代码,并提供简单故障原因。
按下功能键OK,清除故障信息;
按下功能键Check,还能看到系统提供的排除该错误的方法和建议。
Error code number为故障代码;
Category of error为故障类別;
Reason for error为故障发生的原因;
Message log为记录故障发生的时间及简单的原因;
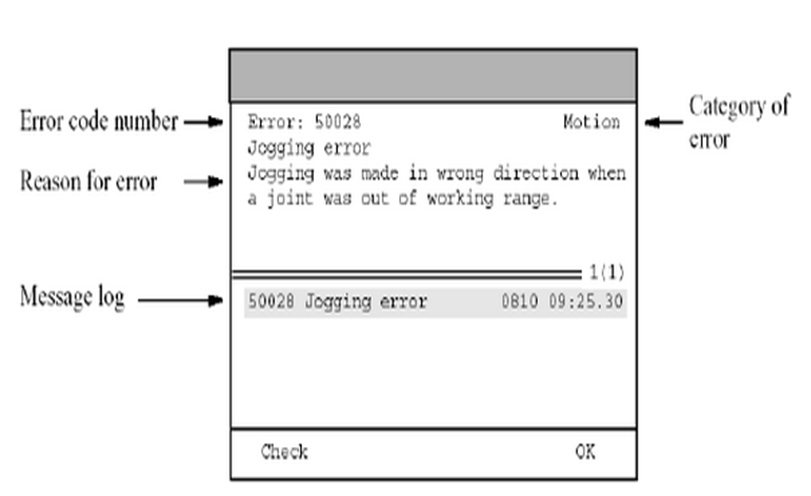
图12.34 机器人故障信息
3. 紧急制动及紧急制动的复位
当机器人遇到突发状况时,可以按下急停键对机器人紧急制动。当急停键按下后,电机电源被迅速切断而停止程序运行。排除引起急停的因素后,在示教器上按OK键确认故障信息,复位急停键,并重新按下MOTORS ON即可恢复系统。
4. 关机
机器人所有的输出信号都会因关机而消失,夹具上的工件可能因此而掉下来。首先停止程序的运行。然后旋转主电源开关由1~0,切断380V电力。建议:除非停电不要关机,这样能保证后备电池的寿命。

