
1.机器人操作面板
机器人操作面板上有多个功能按钮,如图12.6所示。这些按钮包括:马达上电按钮、机器人急停按钮、操作模式选择器和运行时间计时器。
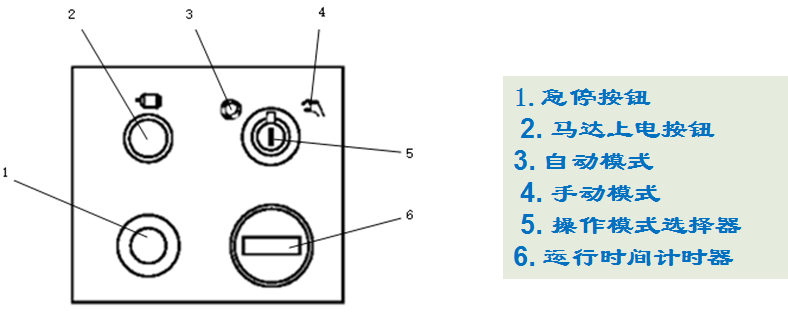
图12.6 机器人操作面板
2. 示教器的功能
示教器由Emergency stop button(E-Stop)(急停开关)、Enabling device(使能器)、Joystick(操纵杆)、Display(显示屏)组成,如图12.7所示。
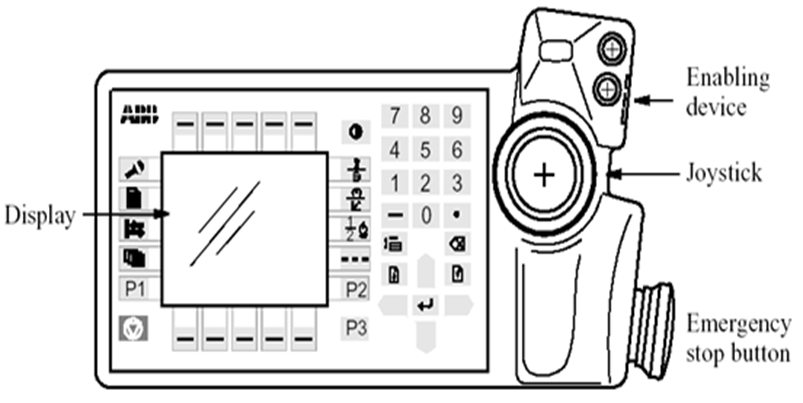
图12.7 机器人的示教器
示教器面板各键的功能如图12.8所示。其中窗口键(window Keys)包括Jogging(操纵窗口)、program(编程窗口)、Input/Outputs(输入/输出窗口)、Misc.(其他窗口)四个键。Jogging(操纵窗口)用于手动状态下,操纵机器人,此时显示屏上显示机器人相对位置及当前坐标系。Program(编程窗口) 用于手动状态下编程与测试。Input/Outputs(输入/输出窗口),用来显示输入输出信号表与其数值。可手动给输出信号赋值。Misc.(其他窗口):包括系统参数、服务、生产以及文件管理窗口。
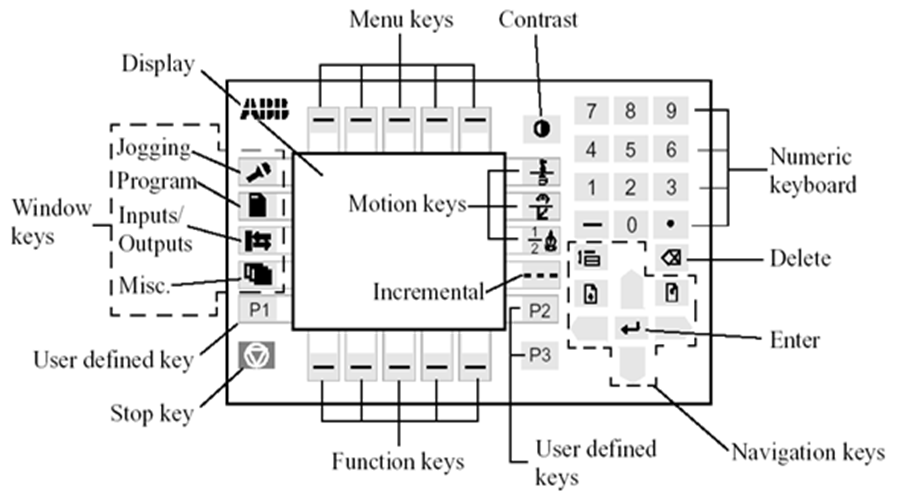
图12.8 示教器面板
3.手动操作机器人
(1)操纵窗口切换
若想对机器人进行手动操作,需要在操纵窗口切换,将机器人操作模式选择器置于手动限速模式。然后切换至操纵窗口。手动操作机器人运动是通过多个运动键实现的,包括运动单元切换键、运动模式切换键。运动单元切换键有External Unit(外轴运动单元)和Robot(机器人)组成;光标指向机器人,操纵杆操纵机器人本体运动。光标指向外轴,操纵杆操纵外轴,一台机器人最多可控制六个外轴。
(2)坐标系设定
如图12.9所示,机器人的坐标系包括:World coordinates(大地坐标系)、Base coordinates(基础坐标系)、Tool coordinates(工具坐标系)、Work object coordinates(工件坐标系)。
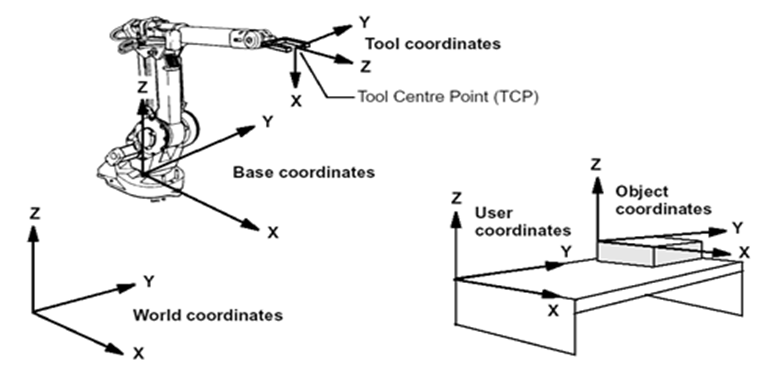
图12.9 机器人的坐标系
(3)坐标系的选择
进入操纵窗口后,使用光标移动键将光标移至选项Coord,此时显示器下端功能键上将显示World、Base、Tool、Wobj四种选项,按相应功能键选择坐标系,如图12.10所示。
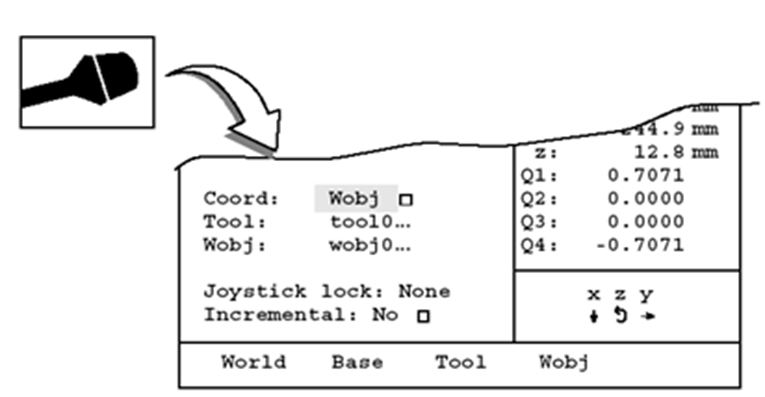
图12.10 机器人的坐标系的选择
(4)工具的选择
进入操纵窗口后,使用光标移动键将光标移至选项Tool,如图12.11(a)所示。按回车键,此时显示器显示机器人系统内部工具清单,如图12.11(b)所示。使用光标移动键将光标移至相应的工具,通过功能键OK选择。
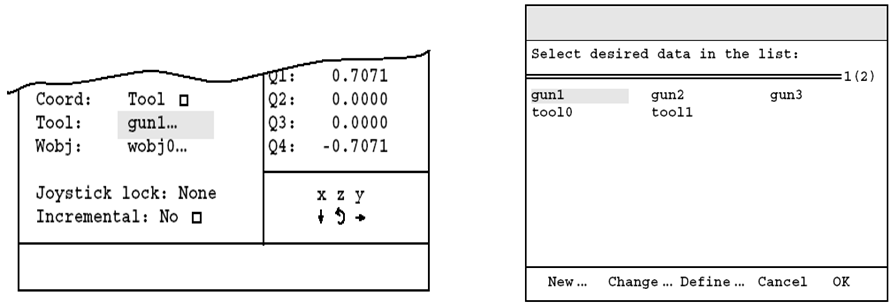
图12.11 机器人工具的选择
(5)工件坐标系选择
使用光标移动键将光标移至选项Wobj,按回车键,显示器显示工件坐标系清单,如图12.12所示,将光标移至相应的工件坐标系,通过功能键OK选择。注意:只有机器人坐标系Coord选择Wobj时,此项选择才起作用。
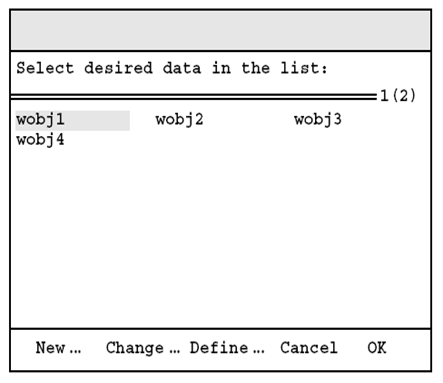
图12.12 机器人工件坐标系的选择
(6)操纵杆锁定选择
进入操纵窗口后,使用光标移动键将光标移至选项Joystick lock,此时显示器下端功能键上将显示None与三种箭头共四种选项,如图12.13所示,按相应功能键选择锁定机器人操纵杆前后、左右与旋转。
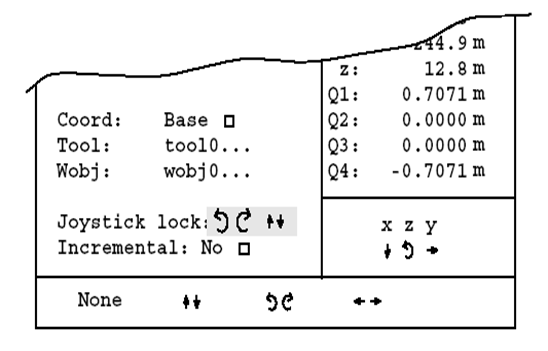
图12.13 机器人操纵杆锁定的选择
(7)点动速度选择
使用光标移动键将光标移至选项Incremental,显示器下端功能键上显示No(Normal) (正常状态,连续移动)、Small(小,每单元移动0.05mm或0.005度)、Medium(中,每单元移动1mm或0.02度)、Large(大,每单元移动5mm或0.2度)与User(用户自定义点动速度)四种选项,按相应功能键选择相应速度,如图12.14所示。
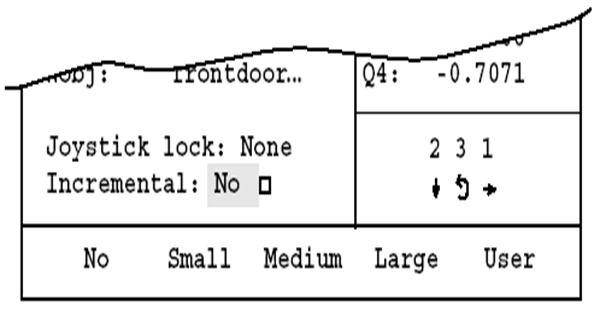
图12.14 机器人点动速度的选择图
(8)机器人当前位置显示
进入操纵窗口后,在显示屏右侧Robot pos会显示机器人当前位置。当机器人运动模式为直线运动或姿态运动时,显示屏显示机器人当前X、Y、Z坐标值与空间姿态值Q1、Q2、Q3、Q4。根据基坐标系、机器人工具TCP或工件坐标系的不同选择,数值会发生变化,如图12.15所示。
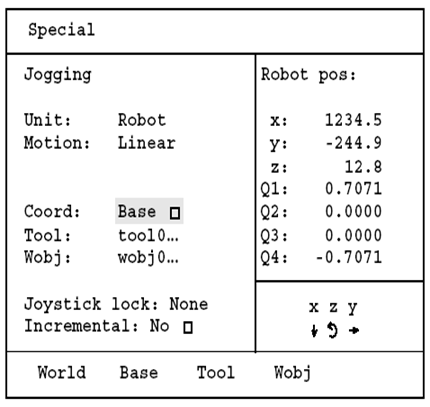
图12.15 机器人当前位置显示
(9)使能器
机器人在自动模式下,使能器无效。机器人在手动模式下,使能器有三个位置。起始为“0”,此时机器人电机不上电。中间为“1”,机器人电机能上电。最终为“0”,机器人电机不上电,必须回到起始状态才能再次使电机上电。
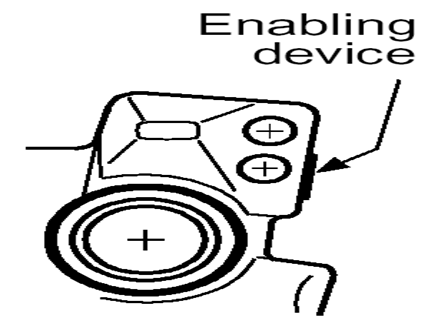
图12.16 使能器
(10)机器人直线运动
若让机器人进行直线运动,首先在示教器上找到Motion keys(运动控制键),将Motion Unit(运动单元切换键)切换到Robot(机器人),即:光标指向机器人。然后,将Motion Type 1(运动模式切换键1)切换至Linear(直线运动),如图12.17所示。
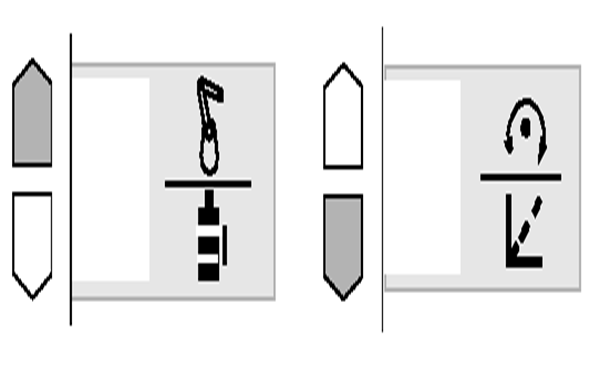
图12.17 机器人直线运动
(11)机器人的姿态运动
若让机器人改变运动姿态,首先在示教器上找到Motion keys(运动控制键),将Motion Unit(运动单元切换键)切换到Robot(机器人),即:光标指向机器人。然后,将Motion Type 1(运动模式切换键1)切换至Reorientation(姿态运动),如图12.24所示。
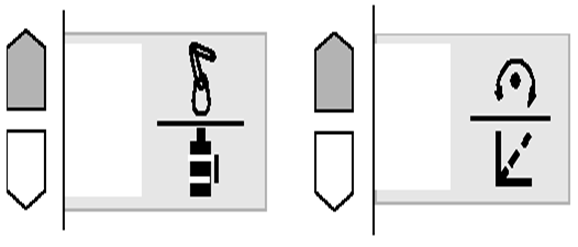
图12.24 机器人的姿态运动
(12)单轴运动
若让机器人改变运动姿态,首先在示教器上找到Motion keys(运动控制键),将Motion Unit(运动单元切换键)切换到Robot(机器人),即:光标指向机器人。然后,选择Motion Type 2(运动模式切换键2)。此时机器人以如图12.26所示的方式单轴运动。
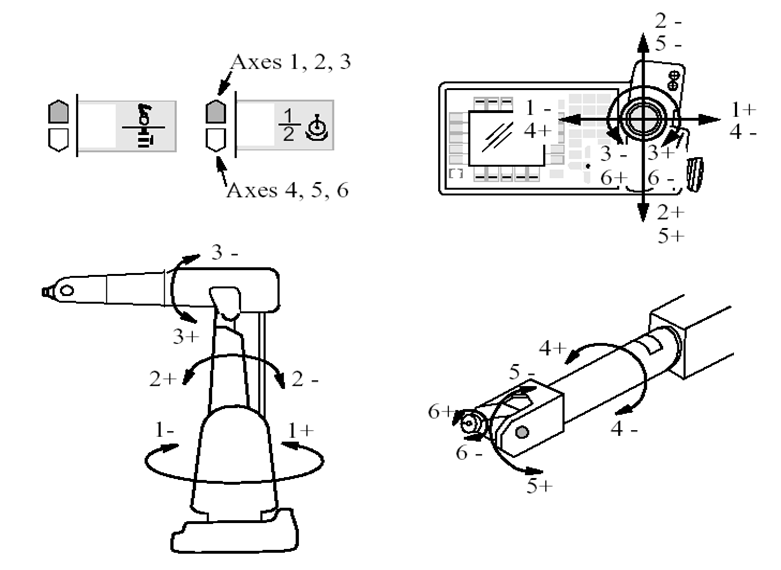
图12.26 机器人单轴运动
(13)外轴运动
进入操纵窗口,按运动单元切换键至外轴运动,此时显示屏在功能键处,显示所有可控制的外轴名称,如图12.27所示。按功能键选择要操纵的外轴单元。如果系统有超过5个外轴,按回车键,功能键上可显示其他的外轴。一般情况下,外轴采用单轴运动方式,如图12.28所示。
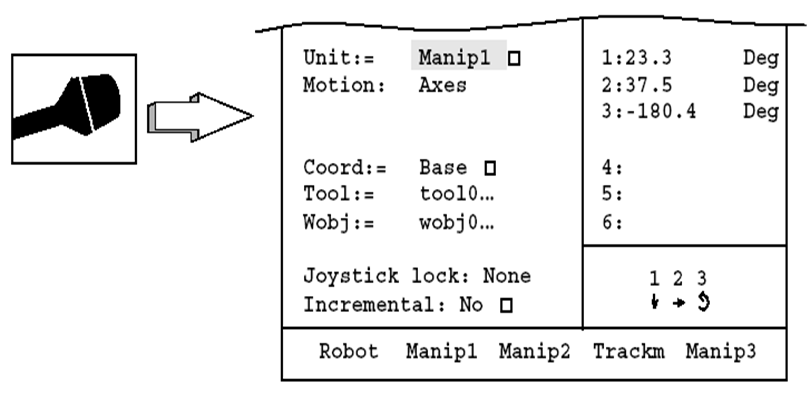
图12.27 机器人外轴运动的选择窗口
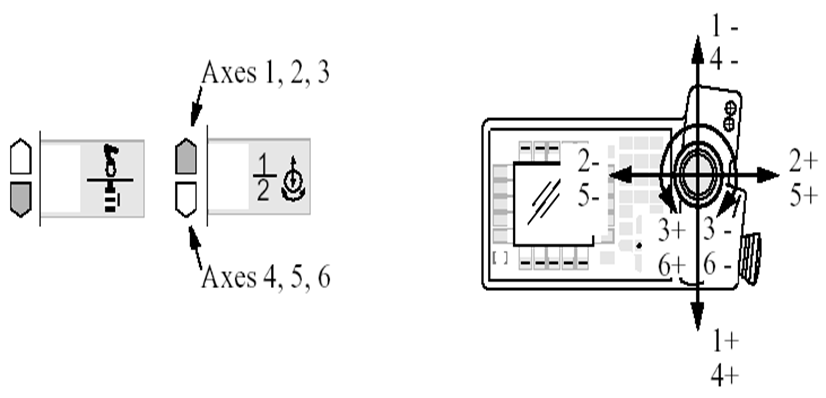
图12.28 机器人外轴运动

