
【案例导入】
ABB此次推出的紧凑型4轴机器人IRB460是全球速度最快的码垛机器人,如图12.1所示,主要用于生产线末端进行高速码垛作业。其操作节拍最高可达每小时循环2190次,运行速度比同类常规机器人提升了15%,作业覆盖范围为2.4米。

图12.1 IRB460码垛机器人
1. ABB机器人的系统组成
ABB机器人系统由机械手、控制柜和系统软件组成。
(1)机械手
ABB机器人的机械手是由六个转轴组成的空间六杆开环机构,属于6自由度关节型机器人,该机械手理论上可达到运动范围内空间任何一点。如图12.2所示。机械手的六个转轴均由AC伺服电机驱动,每个电机后均有编码器。每个转轴均带有一个齿轮箱,机械手运动精度(综合)达正 负0.05mm至正 负0.2mm。
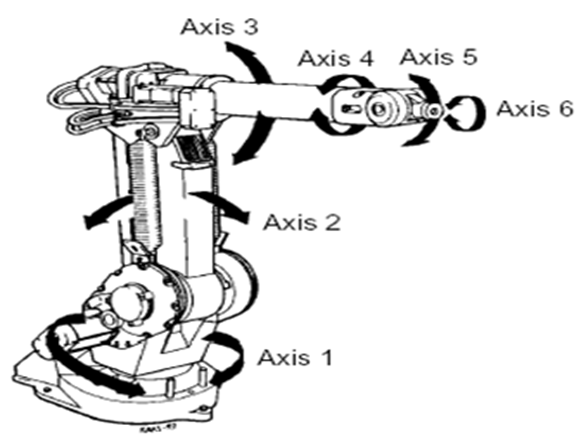
图12.2 机械手
(2)控制柜
ABB机器人的控制柜由硬件部分、控制系统、驱动系统、电源系统和其他主要部件组成。机器人控制柜的外观如图12.3所示,其中Mains Switch为主电源开关,Teach Pendant为示教器,Operators Panel为操作面板,Disk drive为磁盘驱动器。
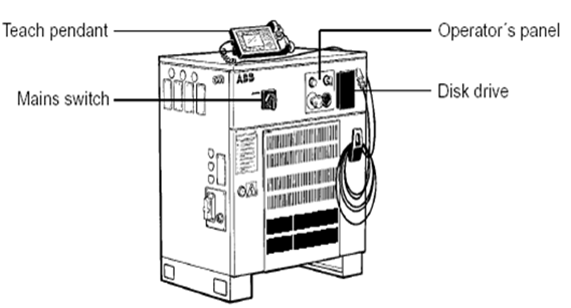
图12.3 控制柜外观图
机器人的控制系统由:Robot computer board(机器人计算机板)、Memory board(存贮板)、Main computer board(主计算机板)、Optional boards(选项板插槽)、Communication boards(通讯板)组成,如图12.4所示。其中,Robot computer board用来控制机器人的运动与输入/输出通讯;Memory board用来增加机器人的额外内存;Main computer board,内含8M 内存,用于控制整个机器人系统,Communication boards用于机器人网络或现场总线通讯。
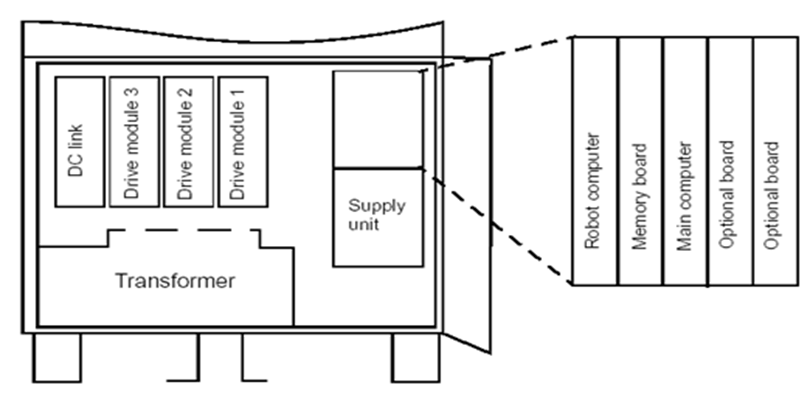
图12.4 机器人控制系统
机器人的驱动系统由DC link和Drive module组成。DC link用来将三相交流电转换为三相直流电;Drive module的每个单元模块控制2-3根转轴的转距。
电源系统由Transformer(进电变压器),Supply unit(直流供电单元,整流输出电压及短路保护)组成。
其他主要部件有:Lithium batteries(锂电池,存贮备用电源),Panel unit(系统安全面板单元,处理所有影响安全与操作的信号),I/O units(输入/输出单元)。如图12.5所示。
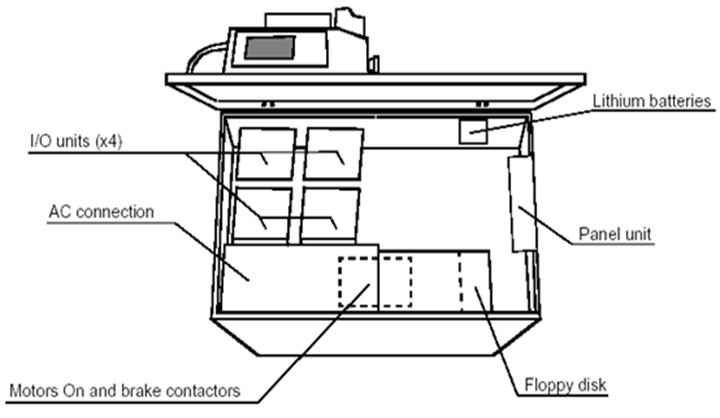
图12.5 控制系统的主要部件
(3)系统软件(Robot Ware)
Robot Ware是ABB提供的机器人系列应用软件的总称,Robot Ware目前包括Base Ware、 Base Ware Option、Process Ware、Desk Ware和Factory Ware五个系列。
除机器人系统软件(Robot Ware)外,ABB公司还自行开发了机器人模拟软件Robot Stadio,RobotStadio能在PC机上模拟几乎所有型号的ABB机器人几乎所有的操作。通过对CAD图纸的转换,RobotStadio可以模拟机器人外围设备与夹具,能够用于配置机器人系统。RobotStadio还带有机器人与系统参数配置软件ConfigEdit、离线编程软件ProgramMaker与机器人冷启动软件RobInstall等。
2. 机器人的型号与特点
ABB机器人的常规型号有:IRB1400、IRB2400、IRB4400、IRB6400。IRB指ABB标准机器人。
机器人型号的第一位数(1,2,4,6)是指机器人承载能力的大小。如IRB1400型机器人,其工作范围较小,最大承载5kg,常用于焊接与小范围搬运。IRB2400型机器人,其工作范围较小,最大承载16kg,常用于焊接、涂刷、搬运与切割。
机器人型号的第二位数(4)是指机器人属于S4以后的系统。S4为ABB公司1994年-1996年生产的机器人,S4C为ABB公司1997年-1999年生产的机器人,S4Cplus为ABB公司2000年以后生产的机器人,
无论何种型号的机器人,都表示的机器人本体特性,而机器人的控制系统则对任何机器人均适用。

