暂无搜索结果
-
1 绪论
-
1.1 机器人的基本概念
-
1.2 机器人的发展概况
-
1.3 机器人的分类
-
1.4 工业机器人的技术参数
-
2 工业机器人的本体结构设计
-
2.1 工业机器人的总体设计
-
2.2 工业机器人的驱动与传动
-
2.3 机身及臂部设计
-
2.4 腕部设计
-
2.5 手部设计
-
3 工业机器人的运动学
-
3.1 物体在空间中的位姿描述
-
3.2 齐次坐标变换
-
3.3 变换方程的建立
-
3.4 工业机器人连杆参数及其变换矩阵
-
3.5 工业机器人的运动学方程
-
4 工业机器人静力学及动力学分析
-
4.1 工业机器人速度雅可比与速度分析
-
4.2 机器人静力学分析
-
4.3 机器人动力学分析
-
5 工业机器人轨迹规划
-
5.1 工业机器人轨迹规划
-
5.2 关节空间法
-
5.3 直角坐标空间法
-
5.4 轨迹的实时生成
-
6 地面移动机器人
-
6.1 移动机器人的类型及特点
-
6.2 轮式移动机器人
-
6.3 履带式移动机器人
-
6.4 步行机器人
-
7 多指灵巧手
-
7.1 多指灵巧手的结构设计
-
7.2 单指机构的运动学模型
-
7.3 多手指协调运动学分析
-
7.4 三指位姿方程的逆向解
-
7.5 灵巧手的静力学分析
-
8 并联机器人
-
8.1 并联机器人的定义与特点
-
8.2 典型的并联机构
-
8.3 并联机构自由度的计算
-
8.4 并联机构的位置分析
-
9 工业机器人的感知
-
9.1 工业机器人传感器概述
-
9.2 位置和位移传感器
-
9.3 机器人的视觉技术
-
9.4 机器人的触觉
-
10 机器人的控制系统
-
10.1 机器人控制系统与控制方式
-
10.2 基于运动坐标的控制
-
10.3 基于运动参数的控制
-
10.4 机器人的智能控制系统
-
11 安川机器人
-
11.1 认识安川机器人
-
11.2 手动操作机器人
-
11.3 NX100 HP6机器人菜单讲解
-
11.4 机器人编程教导
-
11.5 应用设定
-
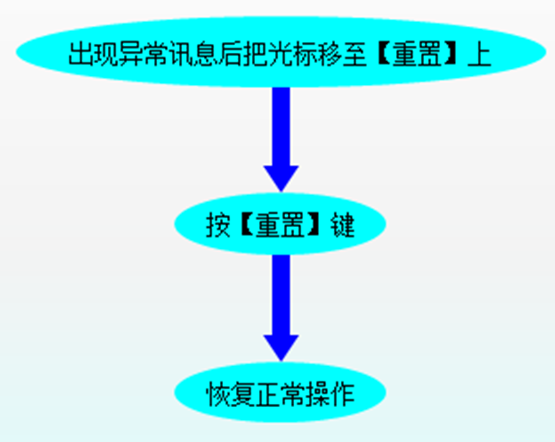
11.6 常见异常情况处理
-
11.7 保养与备品
-
12 ABB机器人
-
12.1 认识ABB机器人
-
12.2 系统安全及环境保护
-
12.3 机器人示教
-
12.4 机器人启动
-
12.5 机器人自动生产
-
12.6 编程与测试
-
12.7 输入输出信号
-
12.8 系统备份与冷启动
-
12.9 文件管理
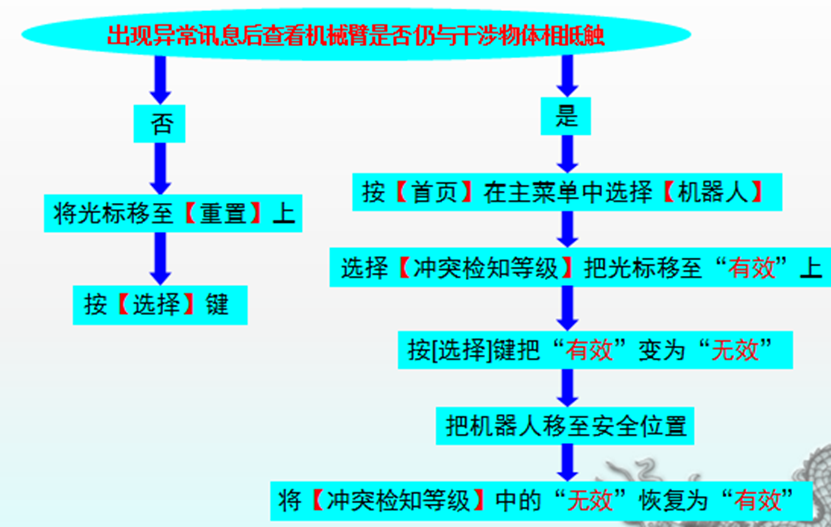
1、冲突检知(外部轴)异常代码:4315
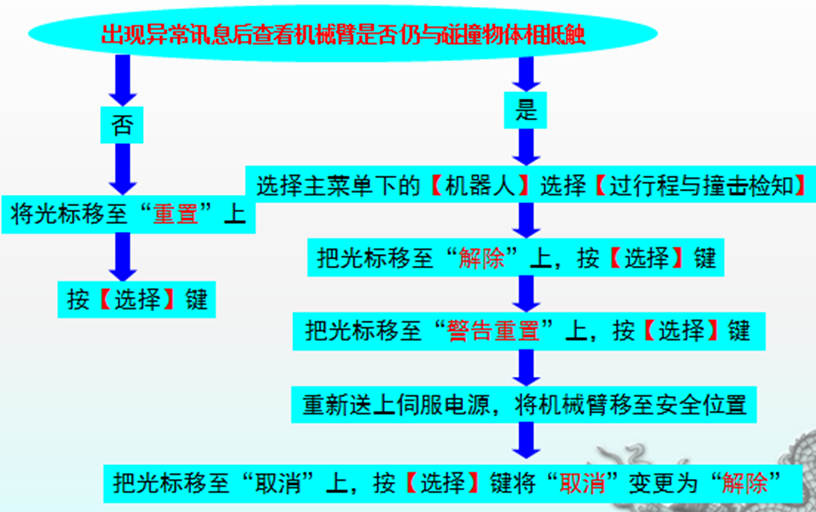
2、撞击检知器动作 异常代码:4110
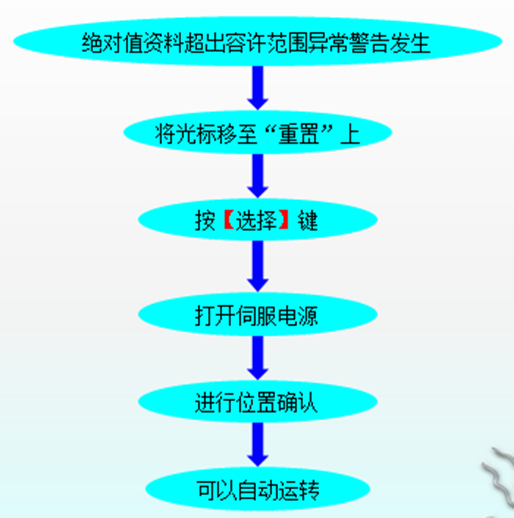
3、绝对值资料超出容许范围 异常代码:4107
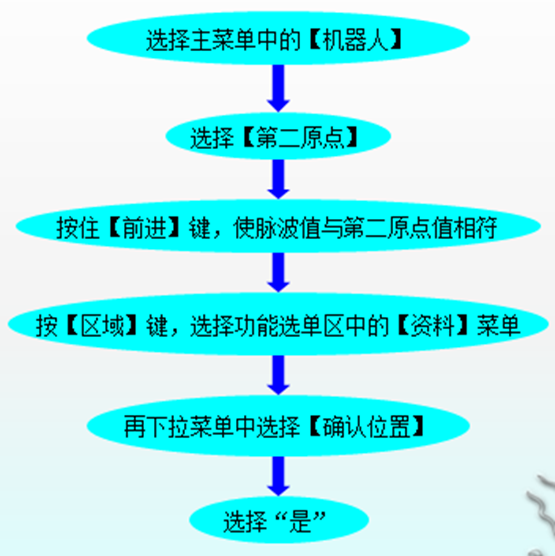
4、位置确认
5、落下量容许范围异常 异常代码:4511

选择班级


