应用设定
上一节
下一节
1、工具资料之设定
要保证机器人能够按照一定的精度完成任务,在将工具安装到机器人上后,需要对工具进行设定,即: 保证工具的中心点与校正点重合,如图11.46所示。由于机器人的末端执行器(工具)的形式多种多样,所以校正方法也不尽相同。但末端执行器(工具)大致可分为三类,校正时可按如图11.47所示进行。
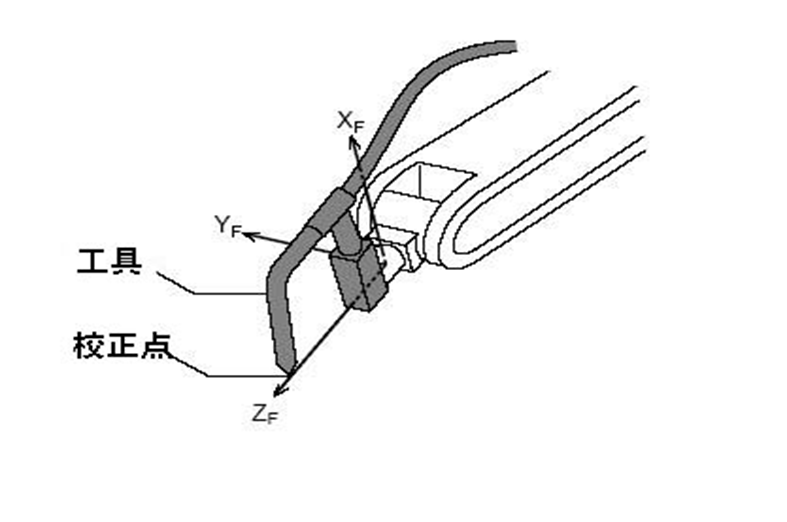
图11.46 工具与机械臂
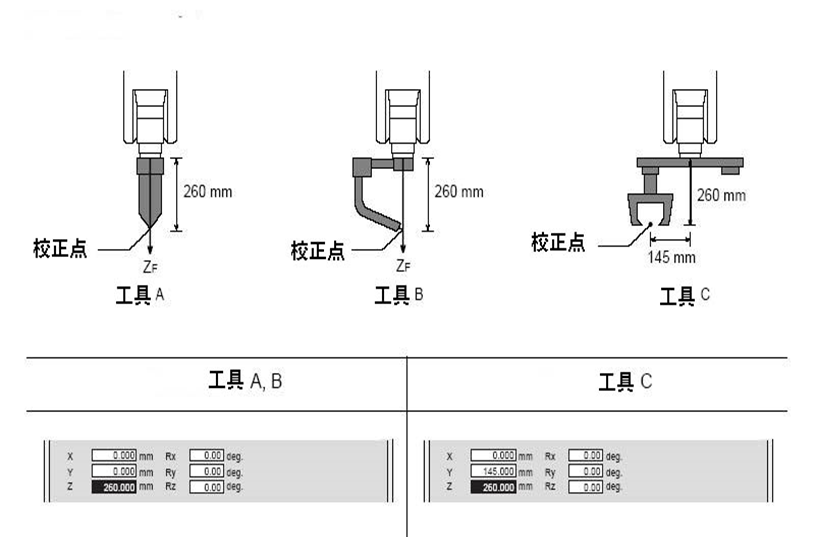
图11.47 工具的设定
2、五点校正法
为提高精度、准确度,使机器人工具端点更为准确,需要采用五点校正法对机器人工具端点进行校对,如图11.48所示。校对的方法: 选择主菜单→机器人→工具→公用→校正。五点名称分别为: TC1、TC2、TC3、TC4、TC5,每一点的操作都要求机械臂的姿态、幅度不同,而且姿态幅度越大,五点校正法的准确度就越高。然后操作机械臂→更改→输入,确定完TC5后,按完成。使机器人再现: 打开模式play→按伺服启动电源→按下按钮【start】,机器人就自动运转,此程序就为五点校正法。
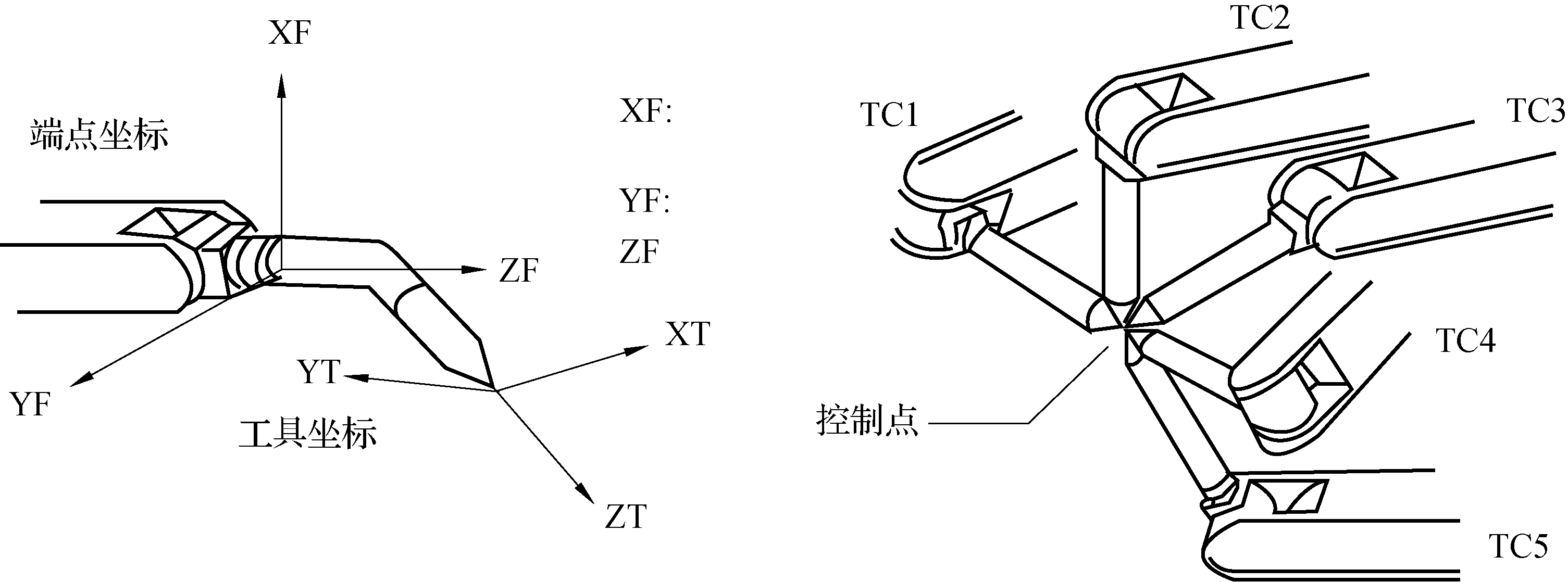
图11.48 五点校正法
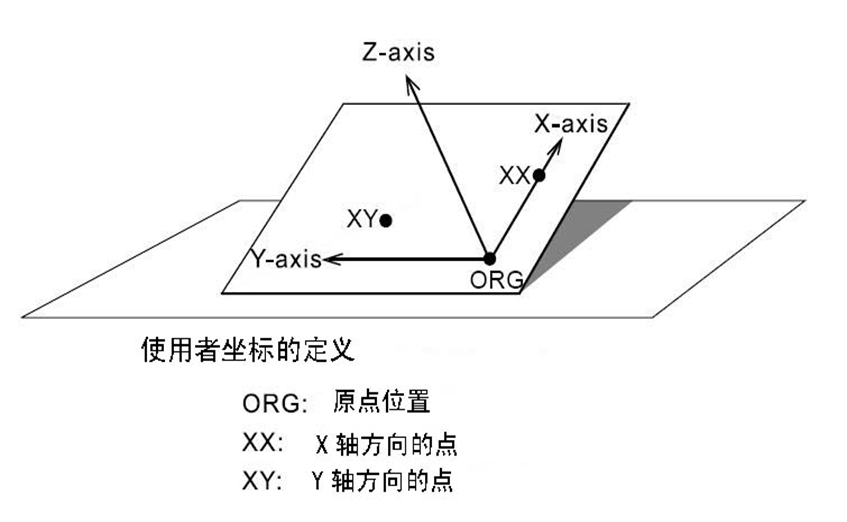
使用者坐标的设定