
1、新程式的建立
要建立一个新的程式,需要按照以下步骤:
1)在编辑模式下选择【程式】菜单
2)选择【建立新程式】,将会出现程式建立画面
3)按【选择】键
4)输入程式名称
5)按【输入】键登录
6)按【输入】键确认
例11-1 为详细了解程式的撰写过程,下面以工件的焊接为例加以说明。如图11.42所示,机器人的初始位置点为程式点1,焊缝为程式点3到程式点4。
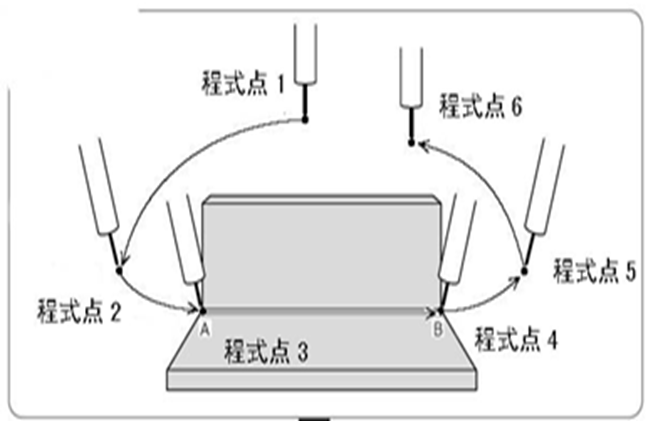
图11.42 工件的焊接
焊接过程分析
为完成工件的焊接,机器人运行包括两个过程:焊接和复位。焊接过程为机器人接收控制系统指令,启动,由程式点1——>程式点2——>程式点3(开始焊接)——>程式点4(停止焊接)——>程式点5——>程式点6。复位为机器人由程式点6回到程式点1,机器人停止并等待控制系统指令,如图11.43所示。

图11.43 机器人复位
机器人运行过程分析
程式点1为机器人的起始位置,操作前先确定机器人在安全的操作区域;程式点2是作业的起始位置,决定机械臂的作业姿态,用轴操作键将机械臂调至作业的姿态,按【输入】登录键登录程式点2;程式点3为作业起始位置,保持程式点2的姿势,将机器人移至程式点3;程式点4为作业完成位置,此点决定焊缝的长度;程式点5远离工件的位置,焊接完成后,需要将机械臂移至距离工件适当的位置;程式点6是机器人起始点附近的位置,用轴操作键,将机械臂移至起始点相近的位置,按【输入】登录键登录程式点6;将程式点6与程式点1重合。
程式路径确认
(1)把光标移至程式的第一点,速度调至低速,按【前进】键把机械臂带到第一点位置;
(2)按【前进】键来检查每个程式点是否正确,每按一次【前进】键,机械臂就会移动一个程式点;
(3)当光标下移至非移动程式行时,机械臂将不会移动至下一点,此时需将光标跳过该非移动程式行,继续确认下面的程式点;
(4)把机器人带到第一点位置;
(5)最后,按住【连锁】+【测试运转】机械臂将会把本程式所有程式行完整地运行一遍;
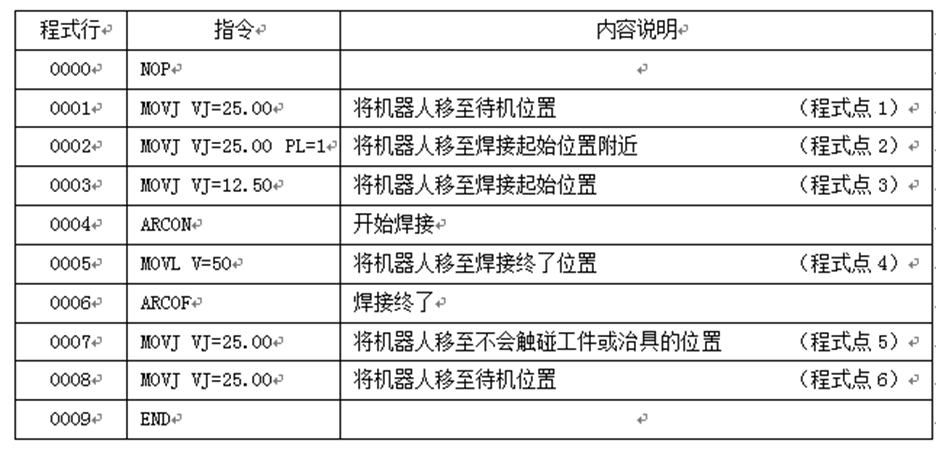
表11.4给出了参考程式和说明。
表11.4 参考程式
2、程式点的修正
程式点的修正方式有插入、删除和变更三种方式,下面对每种方式的操作步骤加以说明。
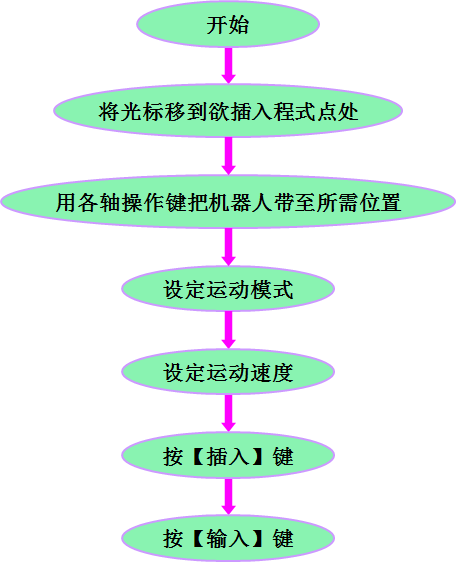
1) 程式点的插入
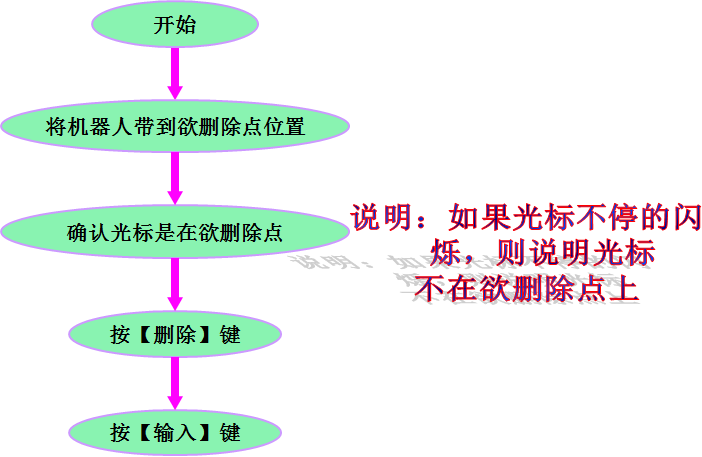
2) 程式点的修正—删除
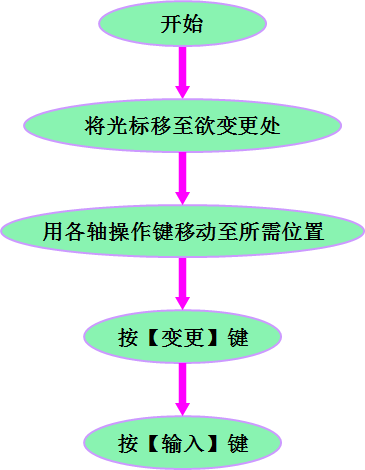
3) 程式点的修正—变更
3、程式内容复制和粘贴
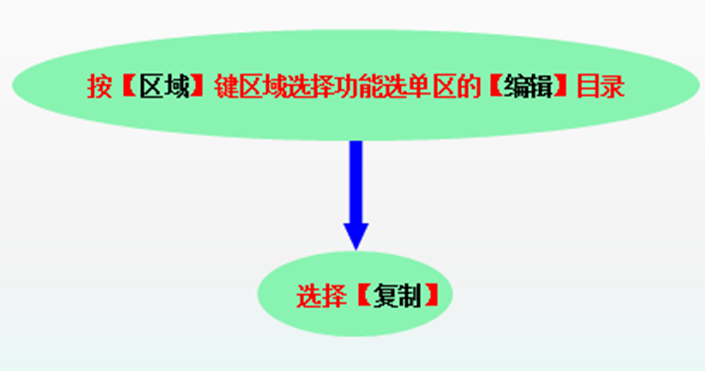
复 制:复制一指定范围到暂存区;
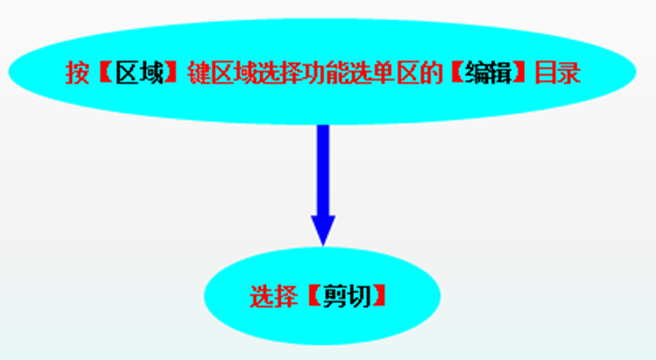
剪 切:从程式中复制一指定范围到暂存区,并在程式中删除;
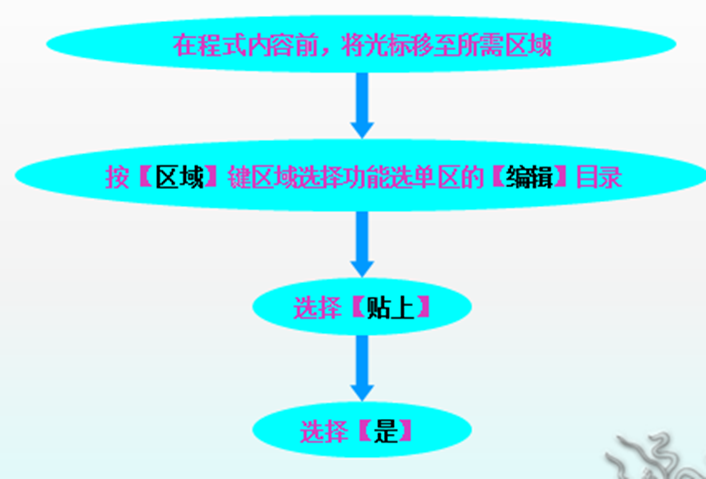
贴 上:将暂存区之内容插入程式中;
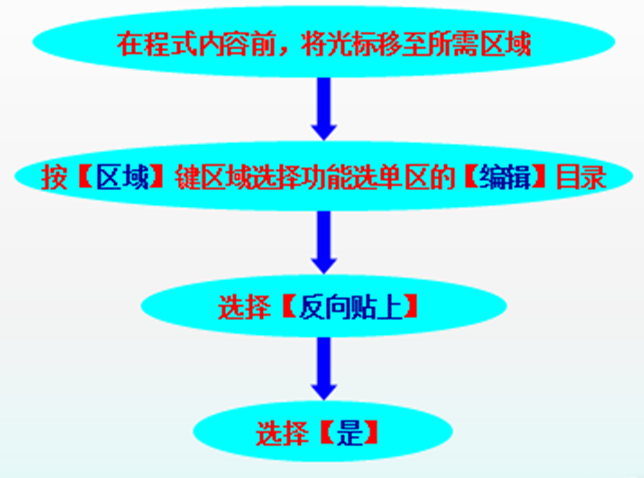
反向贴上:将暂存区之内容反向插入程式中,图11.44为图解程式的复制、剪切和贴上。
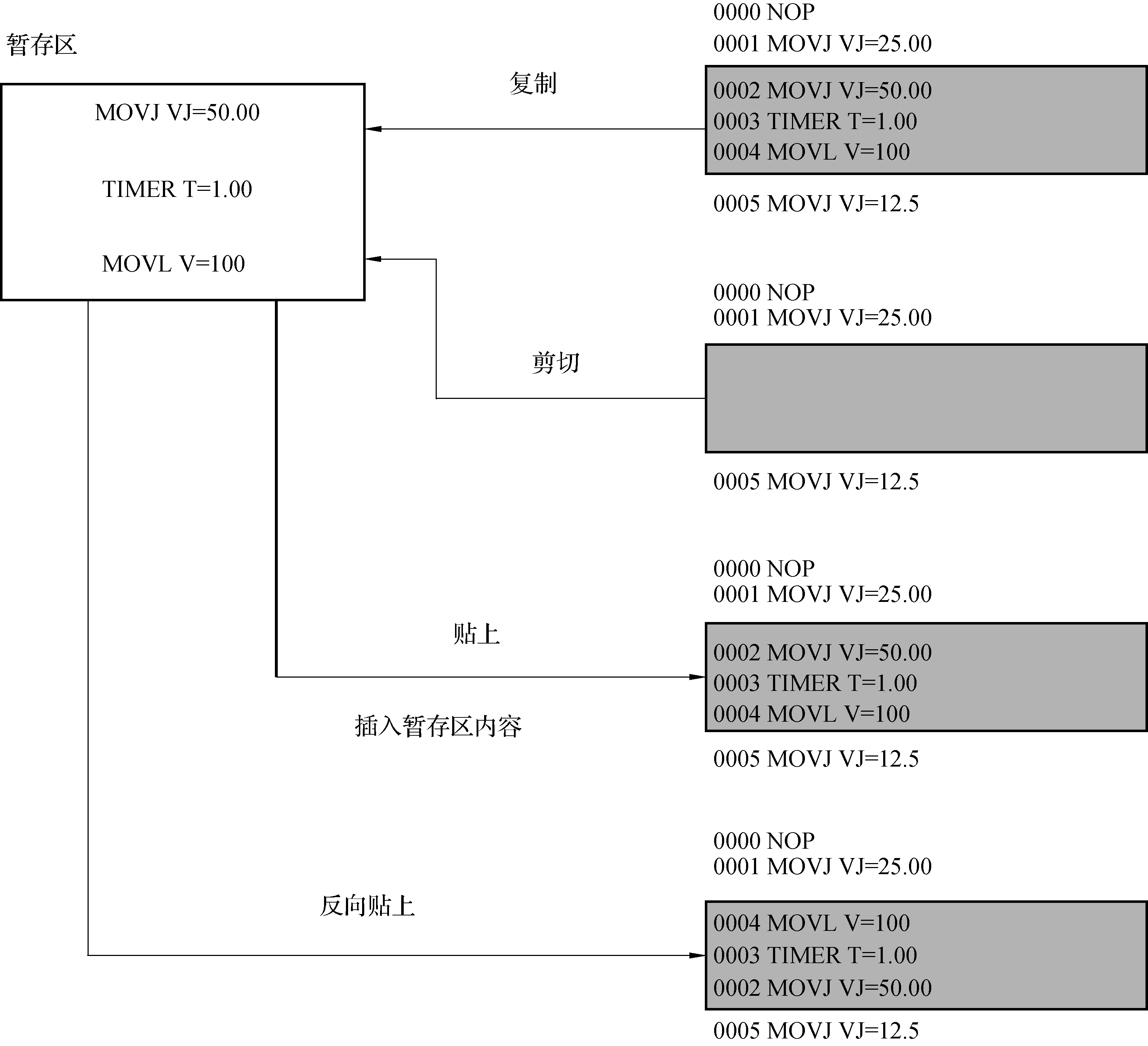
图11.44 图解程式的剪切、复制、贴上
1) 复制和剪切范围设定
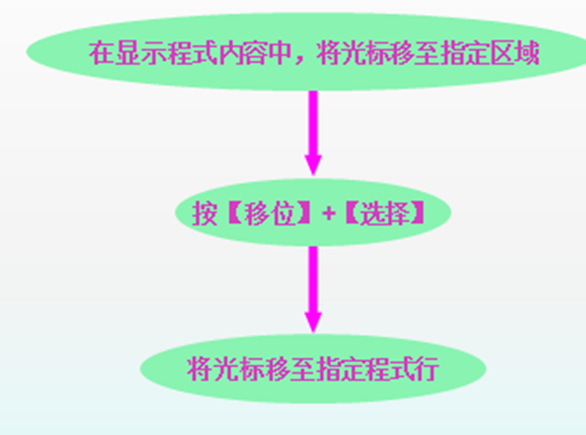
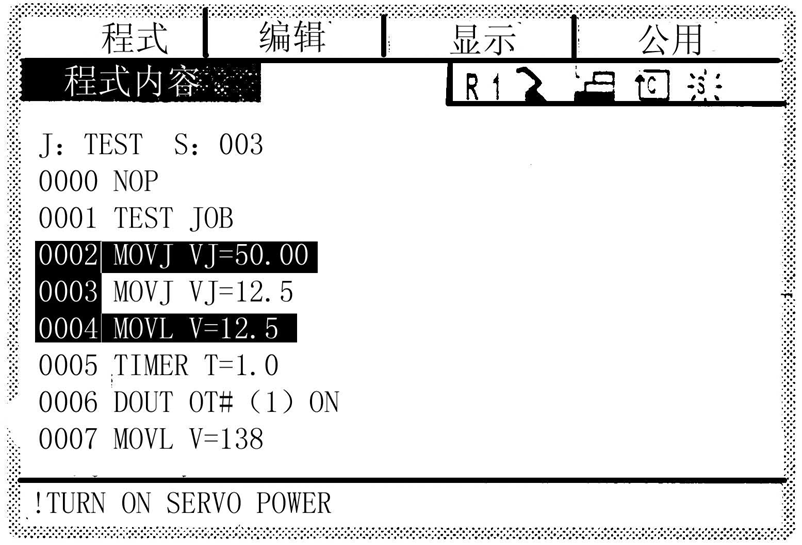
图11.45 图解程式的剪切和复制范围的设定
2) 复制
3)剪切
4)贴上
5)反向贴上
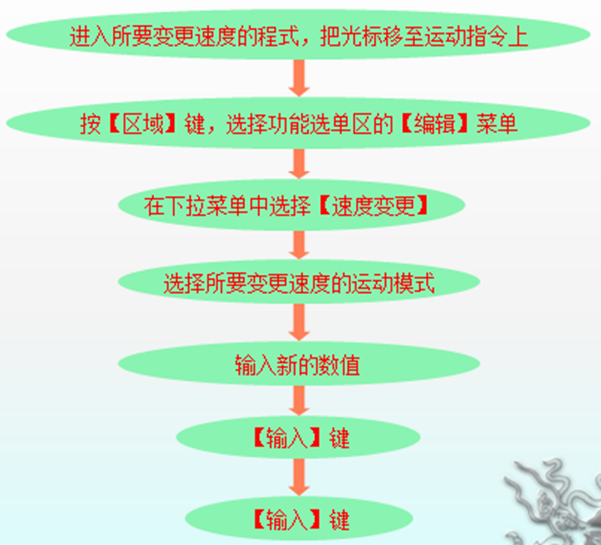
4、速度变更
5、常用程式指令功能讲解

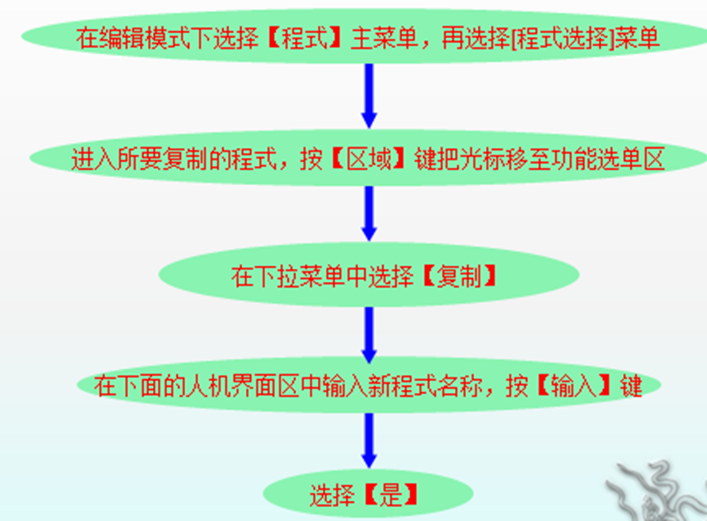
6、程式复制
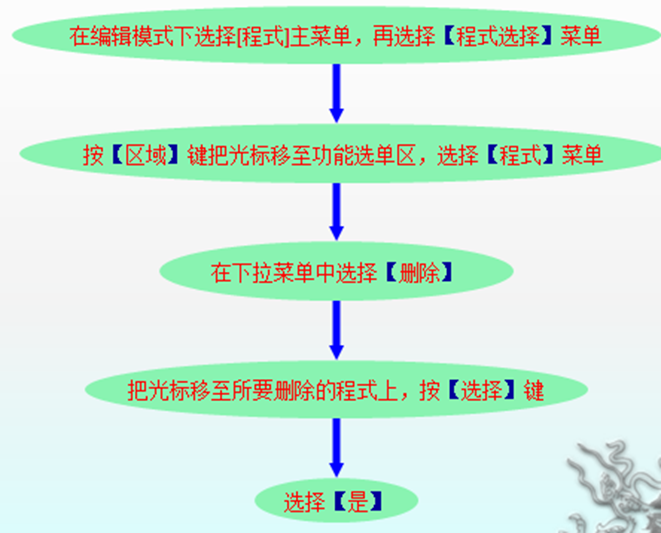
7、程式删除
8、机器人再生运动
(1)再生运转前应进行程式确认,以防在运转中发生碰撞、伤人等危险!
(2)将机器人带到第一程式点位置;
(3)将光标移至程式开头行,按下【教导锁定键】使其指示灯熄灭;
(4)按下控制柜操作盒上的【play】按钮使其指示灯亮;
(5)按下按下控制柜操作盒上的【start】按钮即可进行再生运转,(前提是机器人如装有三孔操作盒必须设定在预约禁止状态)。

