
手动操作机器人
上一节
下一节
1. 操作机器人的流程
(1)安全注意事项
● 开机前应确保本体动作范围内无人无杂物
● 检查控制箱与本体及与其他设备连接是否正确
● 检查供给电源与机器人所需电源相匹配
● 检查各个急停和暂停按钮,确保其功能有效
● 本体运转时,严禁人或物进入其工作范围之内
(2)正确开机步骤
● 打开变稳压器【电源开关】,按下电源【启动】
● 打开控制箱【电源开关】,按照教导器画面上提示按下【伺服】
(3)简单带动机器人
● 在教导盒上将机器人切换至【教导锁定】
● 按下【伺服】使其灯亮起,接通伺服电源
● 注意本体的位姿,速度调到低速,防止发生危险
● 用关节坐标或直角坐标带动机器人
2.机器人教导盒功能
机器人的教导盒上有: 开始键、模式切换键、急停键、暂停键、轴操作键、运动模式选择和多个功能键, 教导盒的外观如图11.20所示。
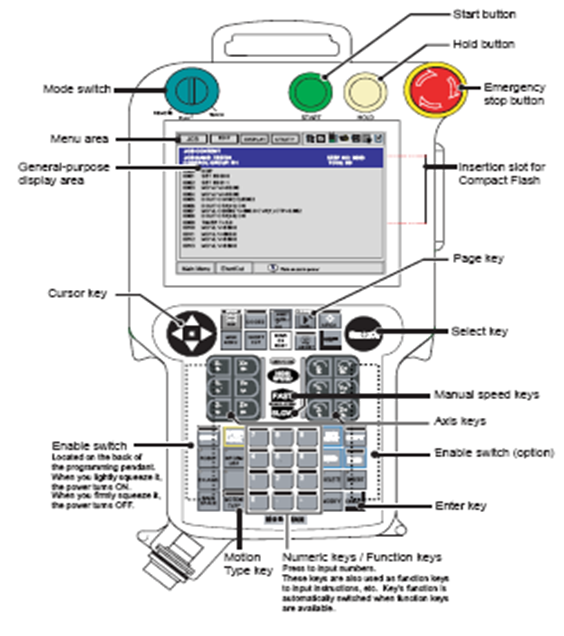
图11.20 教导盒外观

