
【案例导入】
一走进CIROS2016,安川电机“一拖八”的舞龙团队再一次冲击每一位走进展会现场的观众,如图11.1所示。所谓“一拖八”乃安川家1台控制器同时对8台机器人协同进行控制的领先技术。

图11.1 安川机器人
1.机器人的系统构成
安川机器人系统由机械手、控制箱、周边设备(如焊接机、变稳压器等) 组成,如图11.5所示。电控箱为机器人本体(机械手) 的伺服马达供电,并与本体结构之间传输数据,如图11.6所示。机械手部分有三个基轴(S、L、U)和三个臂轴(R、B、T),有六个自由度,即分别为沿X轴、Y轴、Z轴的平移和绕沿X轴、Y轴、Z轴的旋转,如图11.7所示。控制柜的内部有I/O模组、CPU模组、伺服模组、电源供应模组,它是机械手的控制部分,如图11.8所示。
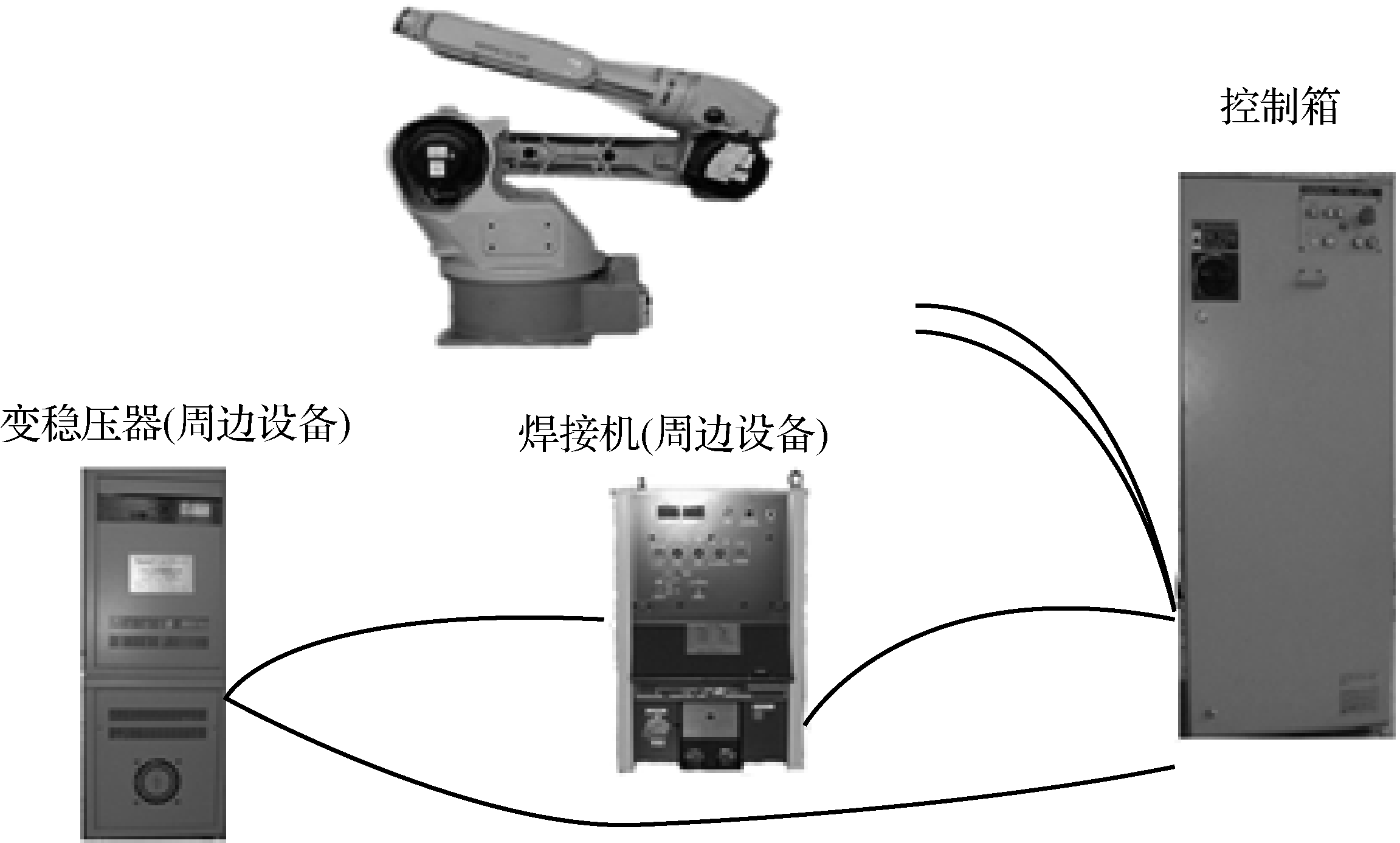
图11.5 安川机器人系统组成
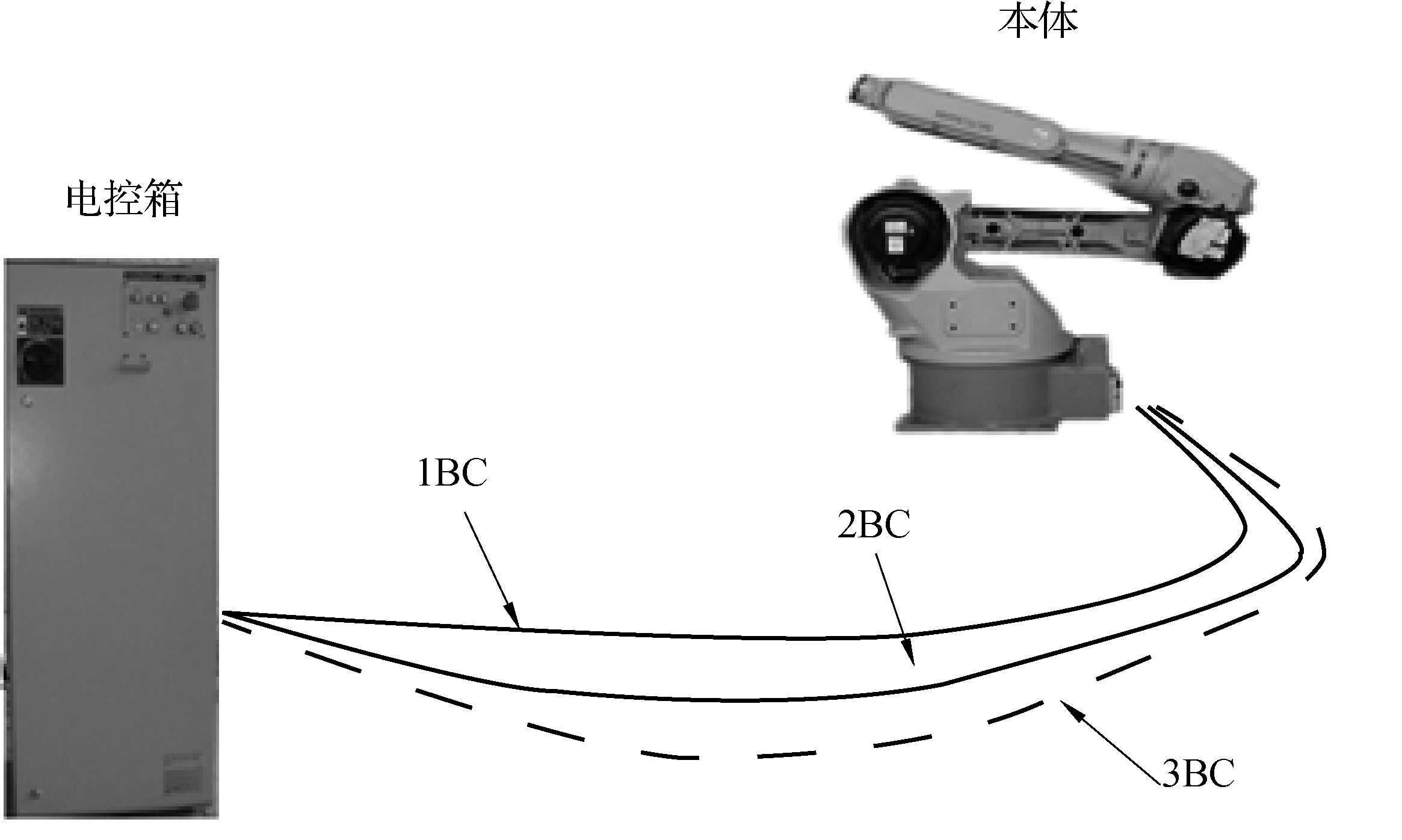
1BC、2BC是传输编码器数据和给伺服马达供电之用
图11.6 本体和电控箱的连接
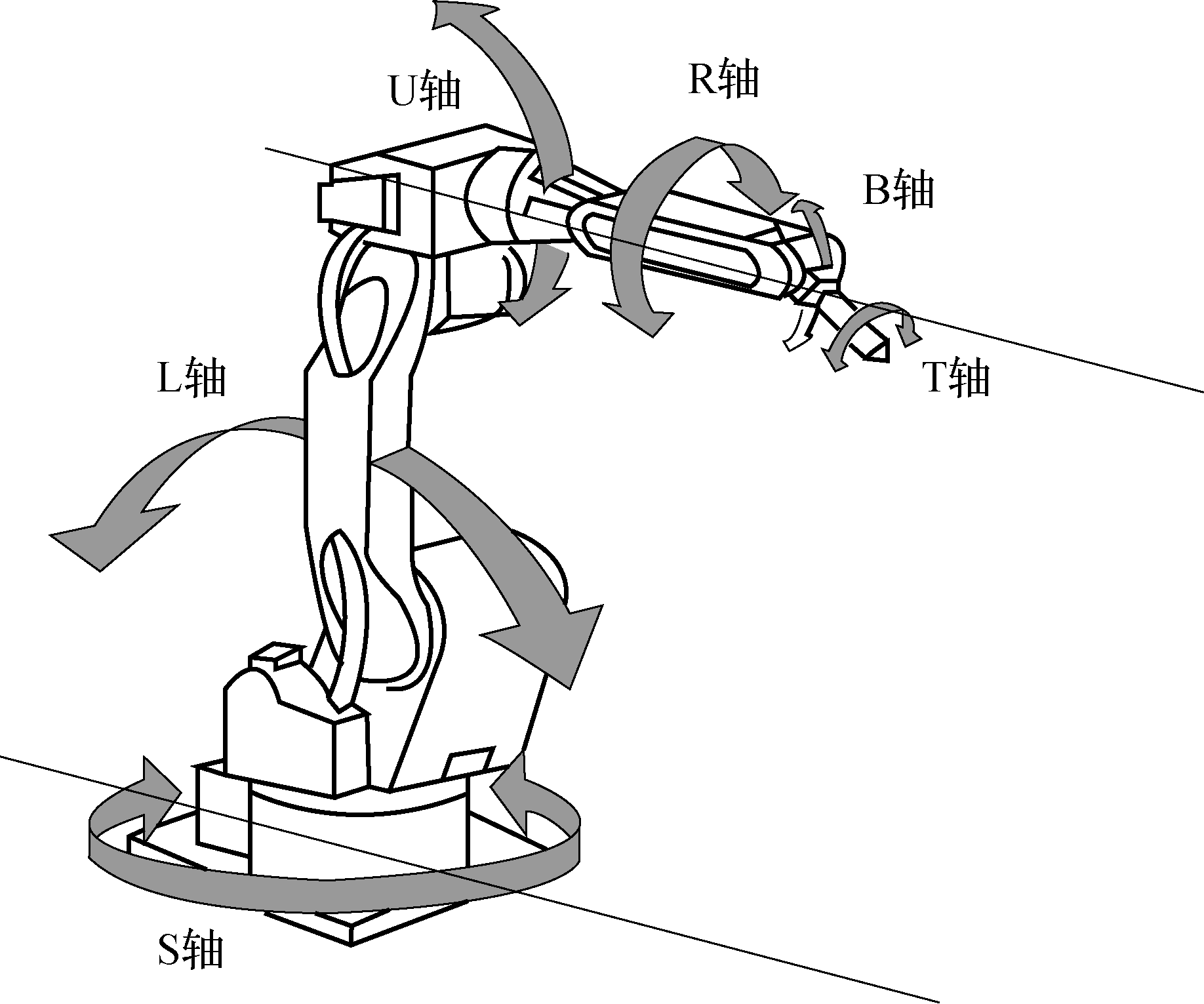
图11.7 机械手
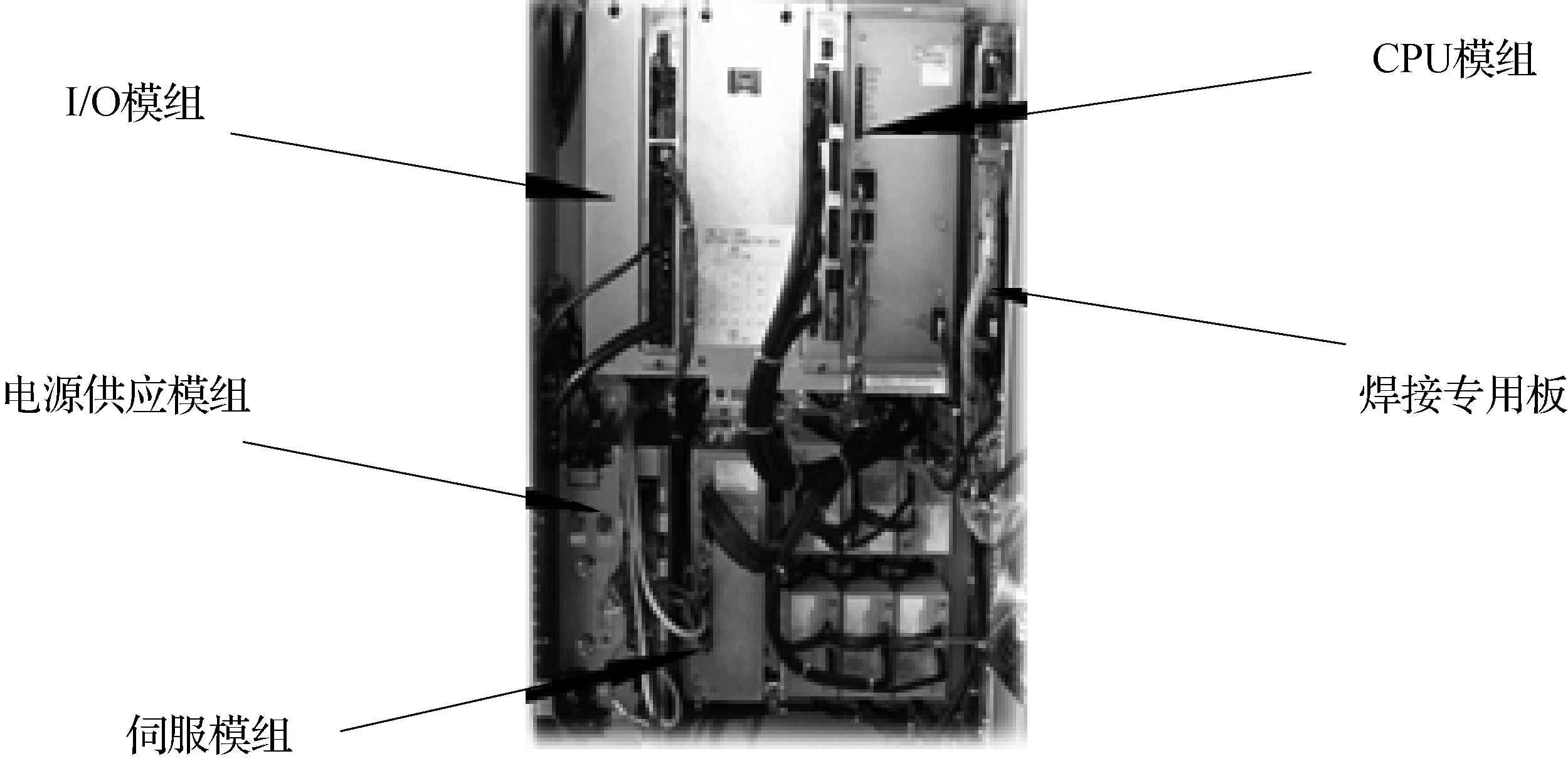
图11.8 控制柜内部
2.安川机器人的型号
安川机器人有多种系列和型号,如控制箱的系列有ERC、MRC、XRC、NX100等,表11.1给出了控制箱部分系列的CPU和对应的字长。机器人本体的型号有:K6SB、K10SB K6、K16、SK6、K6等K系列;UP6、UP130等UP系列;HP6、EA1400N等。下面以焊接机器人为例给出了机器人的承载能力、定位精度和使用场合。
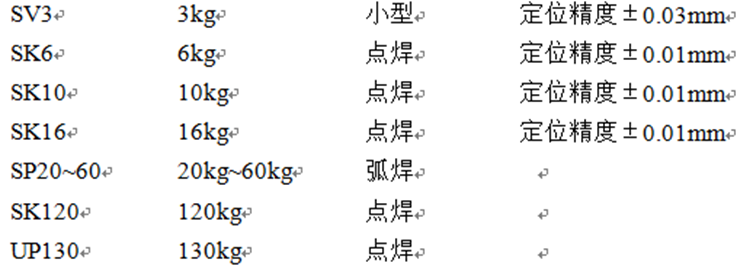
表11.1 控制箱的部分系列

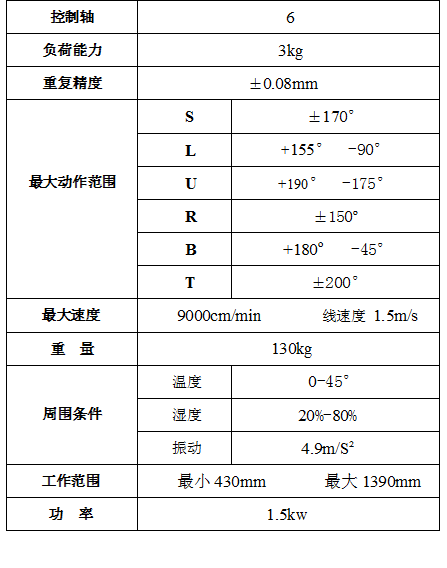
3.机器人技术参数
机器人的技术参数一般包括:自由度(控制轴)、工作空间、定位精度、承载能力和运行速度等。一般生产厂家会在铭牌上给出机器人的技术参数和使用环境。如表11.2给出了HP20本体的技术参数。表11.3给出了EA1400本体技术参数。
表11.2 HP20技术参数
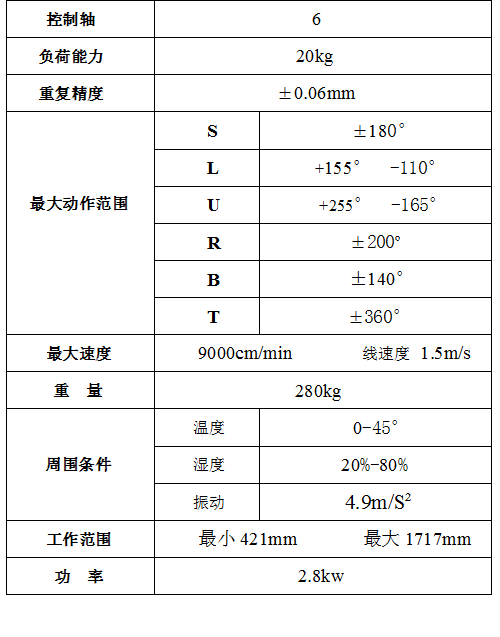
表11.3 EA1400本体技术参数
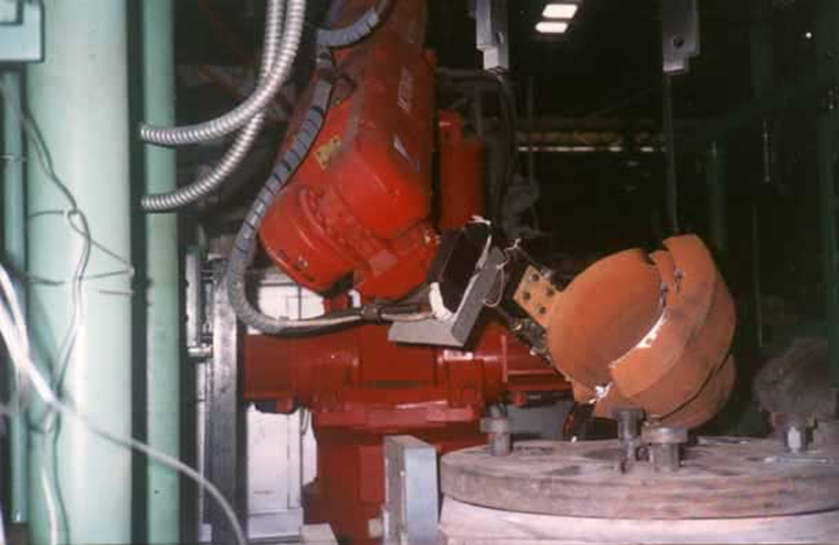
4. 安川机器人在工业生产中的应用
安川机器人在工业生产中应用非常广泛,几乎涉及了加工制造、焊接、浇铸、水刀切割、涂胶、取放、灌注、堆叠……

电 弧 焊
汽车零件业-浇铸

水 刀

涂 胶

汽车零件业-取放

食品业-堆叠

汽车零件业-点焊

