
1 递阶控制系统(Hierarchical control system)
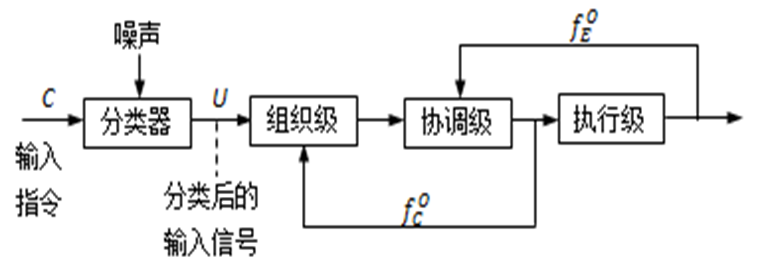
图10.14 递阶智能机器的级联结构
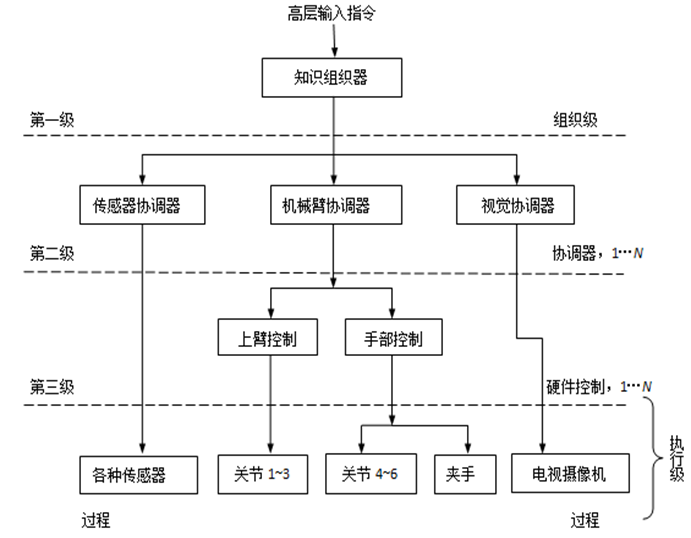
图10.15 具有视觉反馈的机械手递阶控制结构
2 专家控制系统(Expert control system)
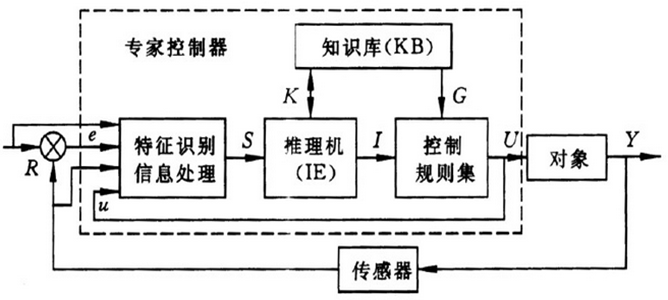
图10.16 专家控制器的典型结构
3 模糊控制系统(Fuzzy control system)
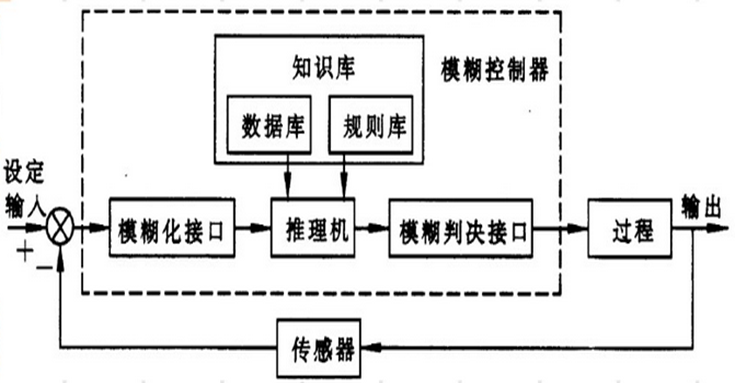
图10.16 模糊控制系统的基本结构
4 学习控制系统(Learning control system)
学习控制用于动态系统的研究,已经提出了许多学习控制方案和方法,包括:
(1)基于模式识别的学习控制;
(2)反复学习控制;
(3)重复学习控制;
(4)连接主义学习控制,包括再励(强化)学习控制;
(5)基于规则的学习控制,包括模糊学习控制;
(6)拟人自学习控制;
(7)状态学习控制。
5 神经控制系统(Neural control system)
神经网络技术和计算机技术的发展为神经控制提供了技术基础,而且还由于神经网络具有一些适合于控制的特性和能力。这些特性和能力包括:
(1)神经网络对信息的并行处理能力和快速性,适于实时控制和动力学控制。
(2)神经网络的本质非线性特性,为非线性控制带来新的希望。
(3)神经网络可通过训练获得学习能力,能够解决那些用数学模型或规则描述难以处理或无法处理的控制过程。
(4)神经网络具有很强的自适应能力和信息综合能力,因而能够同时处理大量的不同类型的控制输入,解决输入信息之间的互补性和冗余性问题,实现信息融合处理。这特别适用于复杂系统、大系统和多变量系统的控制。
6 进化控制系统(Evolutionary control system)
进化控制在对待机器智能的问题上较现有智能控制方法实现了认识与思考方法上的飞跃。进化过程被视为对未知环境的一种创造性的自组织、自适应的发展过程,而不仅仅是一种优化技术。将进化控制应用于复杂系统的控制器设计,可以很好地解决其学习与适应能力问题。
进化控制是综合考察了几种典型智能控制方法的思想起源、组成结构、实现方法和技术等之后提出来的,它模拟生物界演化的进化机制,将进化思想与反馈控制理论相结合,提高了系统在复杂环境下的自主性、创造性和学习能力。
【综合实例分析】
礼仪机器人控制系统的设计
1 礼仪机器人应该具有如下功能特点:
(1)稳定的行走机构,保障机器人运行过程中的平稳性;
(2)根据不同场合,可以做出几套不同的迎宾动作;
(3)礼仪机器人控制系统的响应速度足够快,可以识别出障碍物并能够采用对应的避障策略来实现实时的避障;
(4)具有人性化的人机界面,方便人与机器人之间的交流;
(5)通过控制底层的遥控模块,用户也可以利用遥控来向机器人发出迎宾,引导等各种命令。
(6)电池体积小、能量密度大,保证机器人在各种震动条件下电池的可靠性;
(7)对周围环境的感知能力很强并且拥有通畅的传输信息的能力,不仅可以对周围的环境信息进行稳定可靠的采集,还可以及时准确地反馈给机器人控制系统。
2 礼仪机器人控制系统体系的结构设计:
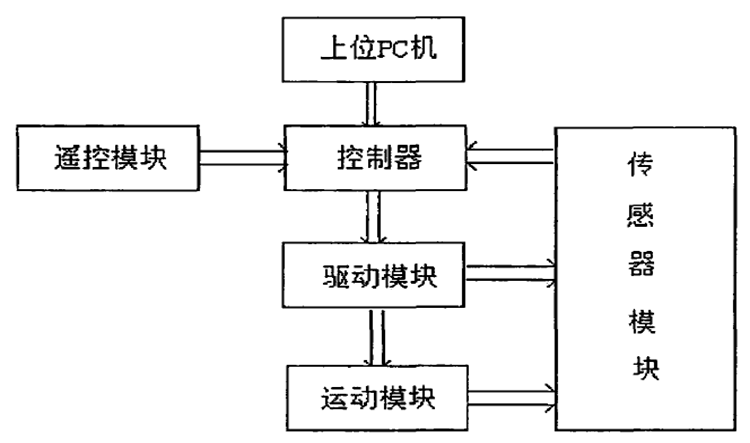
图10.20 礼仪机器人体系结构框图
3 控制系统的硬件组成结构:
礼仪机器人的控制系统在整体上可以分为:上位PC机、控制器、通信模块、传感器模块、电源模块、运动模块、驱动模块以及遥控模块。在设计礼仪机器人控制系统硬件结构的时候,应充分考虑控制系统的体系结构及机器人平台,以满足礼仪机器人在功能需求方面的多样性。
图10.21为礼仪机器人控制系统硬件结构的示意图,采用的是分布式的控制方法,由上位机以及下位机组成。上位机为常用的PC机,主要用来与下位机通讯,接收下位机传过来的信息处理结果,并通过人机界面向下位机发送功能指令。下位机釆用微控制器控制不同的模块,实时釆集各传感器的输入信号,控制各电机的输出,通过RS232串行通讯与上位机通讯,将信息处理的结果传给上位机,接收并执行上位机的功能指令,并通过无线遥控接收装置接收并执行遥控器的指令。
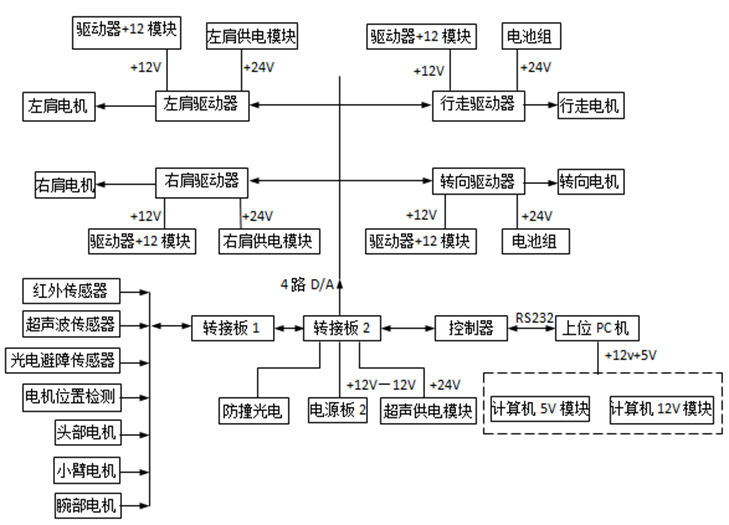
图10.21礼仪机器人控制系统硬件结构的示意图
4 礼仪机器人控制系统的软件设计:
礼仪机器人控制系统的主程序是软件部分的主体,负责整个控制系统的协调控制工作,通过调用不同的子程序来完成不同的工作。子程序主要包括测距子程序、迎宾子程序、自动表演子程序、引导客人进电梯子程序等。控制系统主流程如图10.22所示。
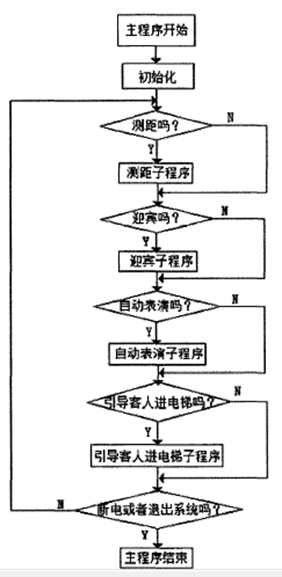
图10.22 控制系统主流程图

