
基于运动坐标的控制
上一节
下一节
1、基于关节坐标的控制(Control based on joint coordinates)
(1)位置控制问题:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
(2)基于关节坐标的控制:基于关节坐标的伺服控制是目前工业机器人的主流控制方式,目前工业机器人的位置控制是基于运动学而非动力学的控制,只适用于运动速度和加速度较小的应用场所。对于快速运动、负载变化大和要求力控的机器人还必须考虑其动力学行为。
2、基于作业空间的控制 (Based on job space control)
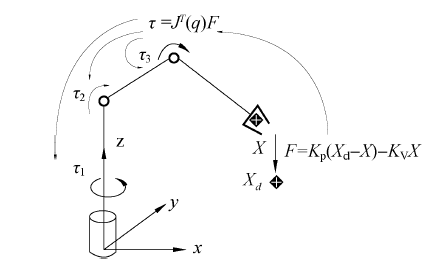
图10.14 基于作业空间的伺服系统控制原理
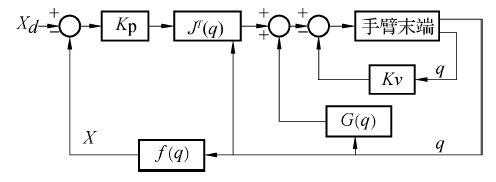
图10.15 基于作业空间的伺服控制系统框图

