
【案例导入】
2014年8月24日,浙江大学医学院附属二院神经外科与浙江大学求是高等研究院合作的“脑机接口临床转化应用课题组”在全国首次成功实现了真正意义上的“用意念操控机械手”的人体实验,达到国际先进水平。志愿者刘某通过脑部“电线”连接,用意念控制机械手同步做出“布”的动作,机械手延迟不到0.5秒。图10.1为志愿者用意念控制机械手。

图10.1 意念控制机械手
1、机器人控制系统的基本原理(Basic Principles of Robot Control System)
控制的目的是使被控对象产生控制者所期望的行为方式,即通过控制来达到使机器人各个部分按照设计者的意图工作;控制的基本条件是了解被控对象的特性,即设计者要根据设计任务,选择控制对象,深度解析被控对象的特性,以达到控制目的;控制的实质是对驱动器输出力矩的控制,即在机器人的控制系统中,设计者一般选取驱动器作为被控对象,通过调节驱动器的输出力矩,进一步控制机器人的整体动作。示意图如10.4所示。
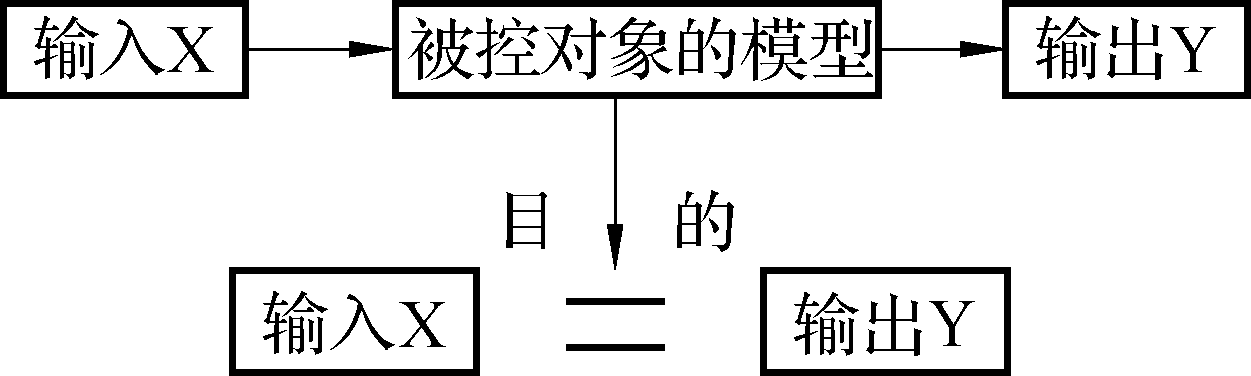
图10.4 机器人控制示意图
为使机器人能够按照要求去完成特定的作业任务,需要以下四个过程:
(1)示教过程:通过计算机可以接受的方式,告诉机器人去做什么,给机器人作业命令;
(2)计算与控制:负责整个机器人系统的管理、 信息获取及处理、 控制策略的制订,作业轨迹的规划等任务,这是机器人控制系统的核心部分;
(3)伺服驱动:根据不同的控制算法,将机器人控制策略转化为驱动信号,驱动伺服电机等驱动部分,实现机器人的高速、 高精度运动,去完成指定的作业;
(4)传感与检测:通过传感器的反馈,保证机器人正确地完成指定作业,同时也将各种姿态信息反馈到机器人控制系统中,以便实时监控整个系统的运动情况。
2、机器人控制系统的组成(The composition of the robot control system)
工业机器人系统通常分为机构本体和控制系统两大部分。控制系统的主要作用是根据用户的指令对机构本体进行操作和控制,完成作业的各种动作。构成机器人控制系统的要素主要有计算机硬件系统及操作控制软件、输人/输出设备及装置、驱动器、传感器系统,它们之间的关系如图10.5所示:

图10.5 机器人控制系统组成图
1)软件组成:主要是指控制软件,它包括运动轨迹规划算法和关节伺服控制算法及相应的动作程序。
2)硬件组成:主要包括中心控制器、传感器、驱动放大器、执行机构、电源等。
3、机器人控制方式以及控制系统的分类(Robot control and control system classification)
工业机器人控制方式的选择,是由工业机器人所执行的任务决定的,对不同类型的机器人应该选择不同的控制方法。工业机器人控制的分类,没有统一的标准,有很多分类方法。
(1)机器人控制系统按其控制方式分类
1)集中控制方式:一台计算机实现全部控制功能,结构简单,成本低,但实时性差,难以扩展。
2)主从控制方式:采用主、从两级处理器实现系统的全部控制功能,实时性较好,适于高精度、高速度控制,但其系统扩展性较差,维修困难。
3)分散控制方式:按系统的性质和方式将系统控制分成几个模块,每一个模块各有不同的控制任务和控制策略,实时性好,易于实现高速、高精度控制,易于扩展,可实现智能控制,是目前流行的方式。
(2)机器人控制系统按其运动控制方式分类
1)位置控制方式:工业机器人位置控制又分为点位控制和连续轨迹控制两类。
a.点位控制。这类控制的特点是仅控制离散点上工业机器人手爪或工具的位姿,要求尽快而无超调地实现相邻点之间的运动,但对相邻点之间的运动轨迹一般不做具体规定。点位控制的主要技术指标是定位精度和完成运动所需的时间。
b.连续轨迹控制。这类运动控制的特点是连续控制工业机器人手爪(或工具) 的位姿轨迹。一般要求速度可控、轨迹光滑且运动平稳。轨迹控制的技术指标是轨迹精度和平稳性。
2)速度控制方式:在连续轨迹控制方式的情况下,工业机器人按预定的指令,控制运动部件的速度和实行加、减速,以满足运动平稳、定位准确的要求。
3)力(力矩)控制方式:力(力矩)控制是对位置控制的补充,这种方式的控制原理与位置伺服控制原理也基本相同,只不过输入量和反馈量不是位置信号,而是力(力矩)信号。
4)智能控制方式:采用智能控制技术,使机器人具有较强的环境适应性及自学习能力。
除上述的控制系统分类外,还可按运动坐标控制的方式分为:关节空间运动控制和直角坐标空间运动控制;按控制系统对工作环境变化的适应程度分为程序控制系统、适应性控制系统和人工智能控制系统;按同时控制机器人数目的多少分为: 单控系统和群控系统。
4 机器人控制系统的要求、特点(Robot control system requirements, characteristics)
(1)一般要求:
控制系统应该满足记忆、示教、与外围设备联系、坐标设置、人机接口、传感器接口、位置伺服、故障诊断安全保护等基本功能。
(2)控制特点:
1)机器人的控制与机构运动学及动力学密切相关。
2)一个简单的机器人至少要有3~5个自由度,比较复杂的机器人有十几个甚至几十个自由度。
3)机器人控制系统必须是一个计算机控制系统。
4)系统中经常使用重力补偿、前馈、解耦或自适应控制等方法。
5)机器人的动作往往可以通过不同的方式和路径来完成,因此存在一个“最优”的问题。
总而言之,机器人控制系统是一个与运动学和动力学原理密切相关的、有耦合的、非线性的多变量控制系统。

