
1、触觉传感器的一般要求
机器人触觉的原型是模仿人的触觉功能,通过触觉传感器与被识物体相接触或相互作用来完成对物体表面特征和物理性能的感知。
机器人触觉传感器应具备如下特征:
(1)传感器有很好的顺应性,并且耐磨;
(2)空间分辨率为1~2mm,这种分辨率接近人指的分辨率(指上皮肤敏感分离两点的距离为1mm);
(3)每个指尖有50~200个触觉单元(即5×10,10×20阵列单元数);
(4)触点的力灵敏度小于0.05N,最好能达到0.01N左右;
(5)输出动态范围最好能达到1000 : 1;
(6)传感器的稳定性、重复性好,无滞后;
(7)输出信号单值,线性度良好;
(8)输出频响100Hz—1kHz。
触觉传感器按传感原理基本上可以分为开关式、压阻式、压电式、光电式、电容式、电磁式等几类,下面分别介绍有代表性的几种触觉传感器。
2、触觉传感器开关
触觉传感器开关是用于检测物体是否存在的一种最简单的触觉制动器件。当一个电极上承受大于阈值的力时,该电极与另一个电极接触,这样可以用一个电回路来检测该开关接触与否,如图9.26所示。
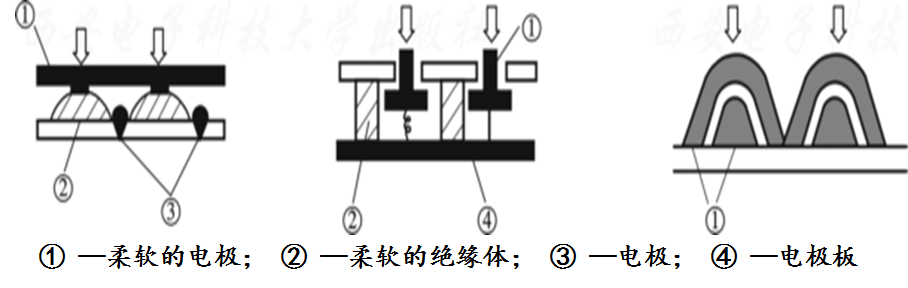
图9.26 矩阵式接触觉传感器
3、压阻式触觉传感器
压阻式触觉传感器是利用半导体材料的压阻效应和集成电路技术制成的传感器。半导体材料在受到力的作用后,电阻率发生变化,通过测量电路就可得到正比于力变化的电信号输出。压阻式传感器的结构形式较多,但工艺复杂。优点是灵敏度高、体积小、耗电少、动态响应好、精度高、测量范围宽、有正负两种符号的应力效应,易于微型化和集成化;缺点是受温度影响较大。
与金属有所不同的是,半导体材料的电阻率主要取决于有限量载流子(电子、空穴)的迁移率,即加在“单晶” 某一轴向上的外应力会引起半导体能带变化,使载流子迁移率发生较大变化,电阻率发生变化。

4、压电式触觉传感器
压电式传感器用于测量力和能变换为力的非电物理量。它的优点是频带宽、灵敏度高、信噪比高、结构简单、工作可靠和重量轻等。缺点是某些压电材料需要防潮措施,而且输出的直流响应差,需要采用高输入阻抗电路或电荷放大器来克服这一缺陷。
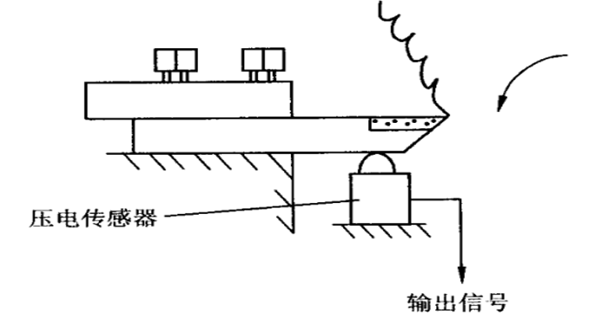
图9.27 压电式触觉传感器
压电效应可分为正压电效应和逆压电效应,正压电效应是指: 当晶体受到某固定方向外力的作用时,内部就产生电极化现象,同时在某两个表面上产生符号相反的电荷,当外力撤去后,晶体又恢复到不带电的状态, 当外力作用方向改变时,电荷的极性也随之改变,晶体受力所产生的电荷量与外力的大小成正比。压电式传感器大多是利用正压电效应制成的。
5、光电式触觉传感器
光电式传感器是将光通量转换为电量的一种传感器,光电式传感器的基础是光电转换元件的光电效应。由于光电测量方法灵活多样,可测参数众多,具有非接触,高精度,高可靠性和反应快等特点,使得光电传感器在检测和控制领域获得了广泛的应用。
外光电效应是指,在光线作用下物体内的电子逸出物体表面向外发射的物理现象。光子是以量子化“粒子”的形式对可见光波段内电磁波的描述。光子具有能量hv,h为普朗克常数,v为光频。光子通量则相应于光强。外光电效应由爱因斯坦光电效应方程描述:
【综合实例分析】
电子秤的制作
1、制作要求
(1)利用电阻应变式传感器制作一个电子称,测量范围为2kg,其分辨力为1克,测量精度0.5%,RD ± 1字;
(2)利用数码管显示测量值。
2、称重传感器
称重传感器是由非电量(质量或重量)转换成电量的转换元件,它是把支承力变换成电的或其它形式的适合于计量求值的信号所用的一种辅助手段。按照称重传感器的结构型式不同,可以分直接位移传感器(电容式、电感式、电位计式、振弦式、空腔谐振器式等)和应变传感器(电阻应变式、声表面谐振式)或是利用磁弹性、压电和压阻等物理效应的传感器。对称重传感器的基本要求是:输出电量与输入重量保持单值对应,并有良好的线性关系;有较高的灵敏度;对被称物体的状态的影响要小;能在较差的工作条件下工作;有较好的频响特性;稳定可靠。
3、整体设计框架及原理图
根据制作要求,这里称重传感器采用电阻应变式传感器,即: 当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。该信号经放大电路放大输出到模数转换器,转换成便于处理的数字信号,输出到数码管显示。故该电子秤的电路原理图如9.28所示。
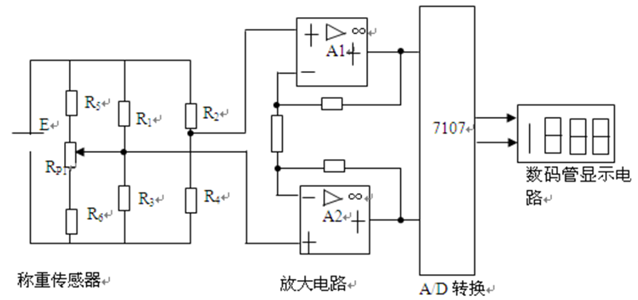
图9.28 电子秤的电路原理图
4、各部分电路设计
(1)电阻应变式传感器的测量电路
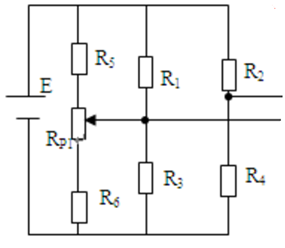
图9.29 桥式测量电路
(2)放大电路
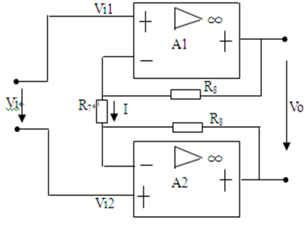
图9.30 差动放大器
(3)A/D转换电路
依据制作要求的测量范围为2kg. 其分辨力为1克. 测量精度0.5%. 故选择的A/D转换电路如图9.31所示。
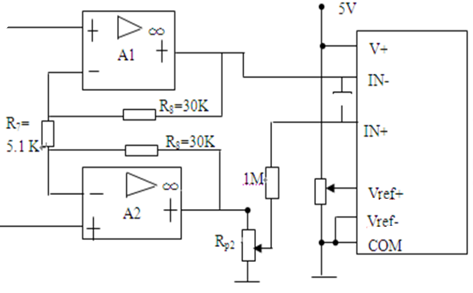
图9.31 桥式测量电路
5、电路调试
(1)首先在秤体自然下垂已无负载时调整RP1,使显示器准确显示零。
(2)再调整Rp2,使秤体承担满量程重量(本电路选满量程为2千克)时显示满量程值。(调节Rp2衰减比)。
(3)然后在秤钩下悬挂1千克的标准砝码,观察显示器是否显示1.000,如有偏差,可调整RP3值,使之准确显示1.000。
(4)重新进行2、3步骤,使之均满足要求为止。
(5)最后测量RP2、RP3电阻值,并用固定精密电阻予以代替。RP1可引出表外调整。测量前先调整RP1,使显示器回零。
至此,整个电子秤的制作完成。
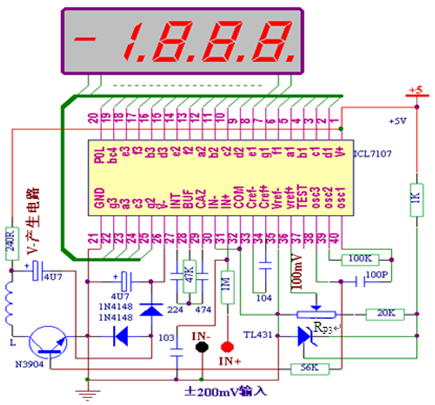
图9.32 电子秤显示电路

