
1、视觉传感器的作用
视觉传感器在机器人上起三个作用:
(1)进行位置的测量,如进行装配时,需要找到对象物(如螺栓、螺母等),并测量装配对象的位置和姿势;
(2)进行图象识别,了解对象物特征,以同其它物体相区别(识别要搬运的各种部件,读出文字、符号等);
(3)对加工零件进行检验,了解加工结果,检查部件形状和尺寸方面的缺陷。
2、视觉系统的性能
实用的工业视觉系统必须满足实际生产线所要求的几个条件。它们除了要求价格低廉外,还要求高速、可靠,具有一定的通用性。
(1)环境安排
视觉系统的环境易于观察,就能保证得到易于处理的图像。例如,如果从倾斜方向去观察三维空间的物体时,随着观察角度的不同,其形状就会有明显的差异。
(2)实用性
与流水作业类似,摄像装置所要观察的对象也是一个一个出现,机器人或其他自动化设备常常要等待视觉的定位和检查结果来实时地决定动作。所以视觉系统一般都把输入图像二维化,使处理简单,同时,还适当考虑处理方式的硬件化。
(3)高可靠性
与操作工人的肉眼相比,工业视觉系统应该具有更高的可靠性。
(4)通用性
小批量或中批量生产的特点就是产品经常变更,视觉系统要能适应这样的变更,具有一定的通用性。
3、机器人视觉系统的组成
视觉系统可以分为图像输入(获取)、图像处理、图像理解、图像存储和图像输出几个部分,见图9.24。
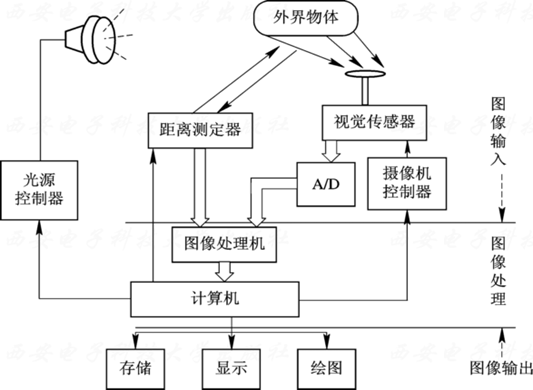
图9.24 视觉系统的硬件组成
(1)视觉传感器
视觉传感器是将景物的光信号转换成电信号的器件。
(2)摄像机和光源控制
机器人的视觉系统直接把景物转化成图像输入信号,因此取景部分应当能根据具体情况自动调节光圈的焦点,以便得到一张容易处理的图像。为此应能调节下几个参量:
1) 焦点能自动对准要看的物体;
2) 根据光线强弱自动调节光圈;
3) 自动转动摄像机,使被摄物体位于视野中央;
4) 根据目标物体的颜色选择滤光器。
此外,还应当调节光源的方向和强度,使目标物体能够看得更清楚。
(3)计算机
由视觉传感器得到的图像信息要由计算机存储和处理,根据各种目的输出处理后的结果。
(4)图像处理机
一般计算机都是串行运算的,要处理二维图像很费时间。在要求较高的场合,可以设置一种专用的图像处理机,以便缩短计算时间。所谓图像处理机,实质上也是一个计算机,从结构上来说,可口分为并型、串并型等。

