
位置感觉和位移感觉是机器人最起码的感觉要求,没有它机器人将不能正常工作。机器人的位置和位移可以通过位置和位移传感器来测量ꎮ 机器人的位置传感器有时也叫接近开关,它所测量的不是一段距离的变化量,而是通过检测,确定是否已达到某一规定的位置。因此它不需要产生连续变化的模拟量,只需要产生能反映某种状态的开关量就可以。因此位置传感器一般采用ON/ OFF 两个状态值来检测机器人的起始原点、终点位置或某个确定的位置。常用的位置传感器有微型开关、光电开关等。机器人的位移是指物体的某个表面或某点相对于参考表面的位置变化。通常位移包括线位移和角位移两种。常用的位移传感器有电位器式位移传感器、电容式位移传感器、电感式位移传感器、光电式位移传感器、霍尔元件位移传感器、磁栅式位移传感器以及机械式位移传感器等ꎮ 机器人各关节和连杆的运动定位精度要求、重复精度要求以及运动范围要求是选择机器人位置传感器和位移传感器的基本依据。
1.位置传感器
位置传感器用来检测位置,它能感受被测物的位置并转换成可用输出信号。常用的位置传感器有接触式和接近式两种。接触式传感器的触头由两个物体接触挤压而动作,常见的有行程开关等。接近式传感器,即接近开关是指当物体与其接近到设定距离时就可以发出“动作”信号的开关,它无需和物体直接接触,动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。接近开关有很多种类,主要有电磁式、光电式、差动变压器式、电涡流式、电容式、干簧管、霍尔式等。
(1) 行程开关
行程开关利用生产机械运动部件的碰撞使其触头动作来实现接通或分断控制电路,达到一定的控制目的。原理与按钮类似。当某个物体在运动过程中, 碰到行程开关时,其内部触头会动作,从而完成控制,如在加工中心的X、Y、Z 轴方向两端分别装有行程开关,则可以控制移动范围。通常,这类开关被用来限制机械运动的位置或行程ꎬ 使运动机械按一定的位置或行程自动停止、反向运动、变速运动或自动往返运动等。行程开关按结构形式可分为: 直动式(按钮式),滚轮式(旋转式),微动式,组合式。图9.5为直动式行程开关的原理图。图9.6为直动式行程开关。图9.7为滚轮式行程开关。图9.8为微动式行程开关ꎮ行程开关具有结构简单、动作可靠、价格低廉的优点。
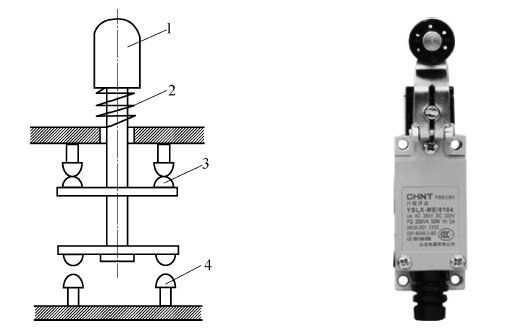
图9.5直动式行程开关的原理图 图9.6直动式行程开关


图9.7滚轮式行程开关 图9.8 微动式行程开关
(2) 光电式位置传感器
光照射到金属上,引起物质的电子性质发生变化ꎮ 这类光变致电的现象被人们统称为光电效应。利用光电效应做成的开关叫光电式接近开关。
1) 光电式位置传感器的工作原理
将发光器件与光电器件按一定方向装在同一个检测头内,当有反光(被检测物体) 接近时,光电器件接收到反射光后便有信号输出,由此便可“感知”有物体接近。如图9.10所示。
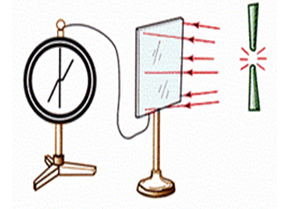
图9.10 光电效应的原理
2) 光电式位置传感器的构成
光电式位置传感器由光源、光学通路、光电元件组成。光电三极管依据光照的强度控制集电极电流的大小。当无光照射时,光电三极管无电流,T2截止,为高电平。当光照达一定强度时,T2导通,
为低电平。
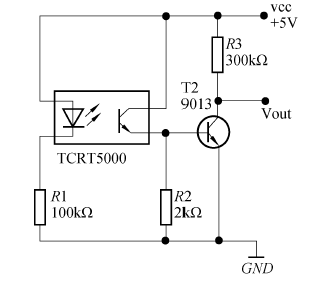
图9.11 光电式位置传感器的构成
3) 光电式位置传感器的特点
光电式位置传感器动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。但光学器件和电子器件价格贵,对测量的环境条件要求高,常应用在环境比较好、无粉尘污染的场合。
(3) 涡流式接近开关(电感式接近开关)
涡流式接近开关有时也叫电感式接近开关。它是利用导电物体在接近这个能产生电磁场接近开关时,使物体内部产生涡流。这个涡流反作用到接近开关,使开关内部电路参数发生变化,由此识别出有无导电物体移近,进而控制开关的通或断。这种接近开关所能检测的物体必须是导电体。
1) 涡流式接近开关的工作原理
由电感线圈和电容及晶体管组成振荡器,并产生一个交变磁场,当有金属物体接近这一磁场时就会在金属物体内产生涡流,从而导致振荡停止,这种变化被后极放大处理后转换成晶体管开关信号输出,如图9.12所示。
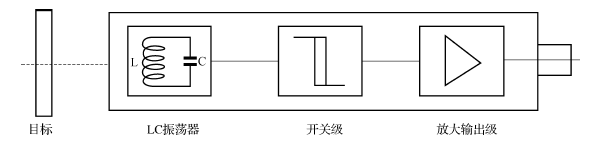
图9.12涡流式接近开关的工作原理
2) 涡流式接近开关的特点
电感式传感器具有结构简单、响应频率高、抗干扰性能好、应用范围广的特点,但电感式传感器只能感应金属。电感式传感器适合用于酸类,碱类,氯化物,有机溶剂,液态,氨水,PVC 粉料,灰料,油水界面等液位测量。
3) 涡流式接近开关的应用
涡流式接近开关被广泛应用于各种自动化生产线,机电一体化设备及石油化工、军工、科研等多种领域,在物理实验中也有应用。图9.13为利用电感式接近开关制作的自动开关门,图9.14为利用电感式接近开关自动计算器。
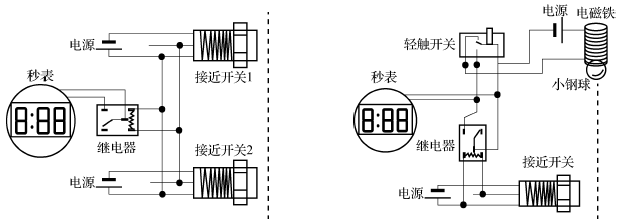
图9.13自动开光门电路 图9.14自动计时器
(4) 电容式接近开关
电容式接近开关检测的对象,不仅局限于导体,也可是以绝缘的液体或粉状物等。电容式接近开关的响应频率低,但稳定性好,安装时需要考虑环境因素的影响。
1) 工作原理
电容式接近开关亦属于一种具有开关量输出的位置传感器,它的测量头通常是构成电容器的一个极板,而另一个极板是物体的本身,当物体移向接近开关时,物体和接近开关的介电常数发生变化,使得和测量头相连的电路状态也随之发生变化,便可控制开关的接通。电容式接近开关的工作原理如图9.15所示。
2) 电容式接近开关的应用
电容式接近开关是一种新型的无触点传感元件ꎬ 可供进行饮料、食品、医药、轻工、家电、化工、机械运行中的行程控制和限位保护,自动生产上的物位检查,食品和饮料的包装、分检,液面控制,物料的计数、侧长、测数等等。此外,它还可以衍生开发多种多样的二次仪器仪表和防盗报警器、水塔水位控制等日用电器。
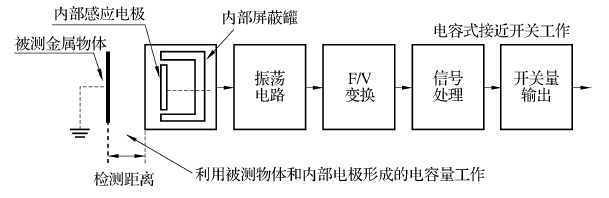
图9.15电容式接近开关的工作原理图
(5) 霍尔式接近开关
霍尔开关属于有源磁电转换器件,它是在霍尔效应原理的基础上,利用集成封装和组装工艺制作而成,它可方便的把磁输入信号转换成实际应用中的电信号,同时又具备工业场合实际应用易操作和可靠性的要求。
1) 霍尔效应
霍尔效应在1879 年被E.H.霍尔发现,它定义了磁场和感应电压之间的关系,这种效应和传统的感应效果完全不同。当电流通过一个位于磁场中的导体的时候,磁场会对导体中的电子产生一个垂直于电子运动方向上的作用力,从而在导体的两端产生电压差,如图9.16所示。假设导体为一个长方体,厚度为d,通过导体的电流为I,磁场强度为B。霍尔发现电压与电流I和磁场强度为B成正比,与导体厚度d 成反比。即:

式中: 叫霍尔系数,它表示该材料产生霍尔效应的能力大小。
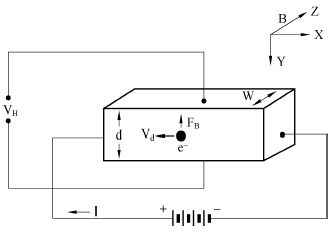
图9.16霍尔效应原理示意图
2) 工作原理
霍尔开关的输入端是以磁场强度B来表示的,当B达到一种程度时,霍尔元件内部的触发电路翻转,霍尔开关的输出电平状态也随之翻转,进而控制开关的通或断。输出端采用晶体管输出,类似有NPN、PNP、常开型,常闭型、锁存型、(双极性) 双信号之分。这种接近开关的检测对象必须是磁性物体。安装时要注意磁铁的极性,磁铁极性装反无法工作,图9.17为内部原理图及输入输出的转移特性。
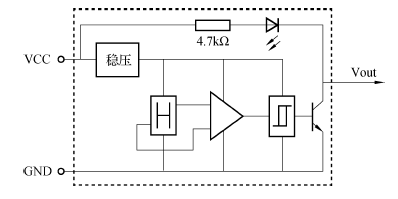
图9.17霍尔开关内部原理图
3) 特点
霍尔开关不仅具有无触点,无开关瞬态抖动,高可靠,长寿命等特点,又有很强的负载的能力和广泛的功能,特别是在恶劣的环境下,它比目前使用的电感式,电容式,光电式等接近开关具有更强的抗干扰能力。
(6) 光电编码器
光电编码器也是一种应用广泛的位置传感器,其分辨率完全能满足机器人技术要求。这种非接触型传感器可分为绝对型和相对型。只要电源加到采用绝对型光电编码器的机电系统中,编码器就能绘出实际的线性或旋转位置。因此,用绝对型编码器装备的机器人关节不要求校准,只要一通电,控制器就知道实际的关节位置。相对型编码器只能提供某基准点对应的位置信息。所以用相对型编码器的机器人在获得真实位置信息以前,必须首先完成校准程序。
2.位移传感器
在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。模拟式又可分为物性型和结构型两种。常用位移传感器以模拟式结构型居多,包括电位器式位移传感器、电感式位移传感器、自整角机、电容式位移传感器、电涡流式位移传感器、霍尔式位移传感器等。数字式位移传感器的一个重要优点是便于将信号直接送入计算机系统。这种传感器发展迅速,应用日益广泛。
(1) 电位器式位移传感器
电位器式位移传感器由一个线绕电阻(或薄膜电阻) 和一个滑动触点组成。其中滑动触点通过机械装置受被检测量的控制。当被检测的位置量发生变化时,滑动烛点也发生位移,改变了滑动触点与电位器各端之间的电阻值和输出电压值,根据这种输出电压值的变化,可以检测出机器人各关节的位置和位移量。
电位器式位移传感器具有很多优点。它的输入输出特性,(即输入位移量与输出电压量之间的关系) 可以是线性的,也可以根据需要选择其他任意函数关系的输人输出特性;它的输出信号选择范围大,只需改变电阻器两端的基准电压,就可以得到比较小的或比较大的输出电压信号。这种位移传感器不会因为失电而破坏其已感觉到的信息。当电源因故断开时,电位器的滑动触点将保持原来的位置不变,只需电源重新接通,原有的位置信息就会重新出现;另外,它还具有性能稳定、结构简单、尺寸小、重量轻、精度高等优点。 电位器式传感器的一个主要缺点是容易磨损。由于滑动触点和电阻器表面的磨损,使电位器的可靠性和寿命受到一定的影响。正因如此,电位器式位移传感器在机器人上的应用受到了极大的局限,近年来随着光电编码器价格的降低而逐渐被取代。
按照电位器式传感器的结构,可以把它分成两大类: 一类是直线型电位器,另一类是旋转型电位稽。
(2) 直线型电位器
直线型电位器主要用于检测直线位移,如图9.20所示。直线型电位器的电阻器采用直线型螺线管或直线型碳膜电阻,滑动触点也只能沿电阻的轴线方向做直线运动,如图9.21所示。直线型电位器的工作范围和分辨率受电阻器长度的限制,由于绕线电阻、电阻丝本身的不均匀性会造成电位器式传感器的输入输出关系的非线性。以电阻中心为基准位置的移动距离与输入电压有如下关系:
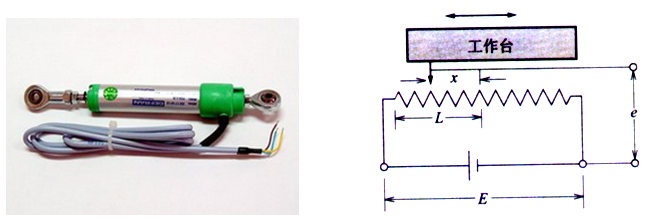
图9.20直线型电位器 图9.21直线型电位器的工作原理图

式中: E: 输入电压;L: 触头最大移动距离;
X: 向左端移动的距离;e: 电阻右侧的输出电压。
(3) 旋转变压器
旋转变压器又称分解器,是一种控制用的微电机,如图9.22所示。它的工作原理是通过转子转动引起磁通量旋转,在次级线圈产生变化的电压,将机械转角变换成与该转角呈某一函数关系的电信号,从而用来测量角位移,如图9.23所示。在结构上旋转变压器与二相线绕式异步电动机相似, 由定子和转子组成。定子绕组为变压器的原边,转子绕组为变压器的副边。 激磁电压接到转子绕组上,感应电动势由定子绕组输出。
旋转变压器结构简单,动作灵敏,对环境无特殊要求,维护方便,输出信号幅度大,抗干扰性强,工作可靠。
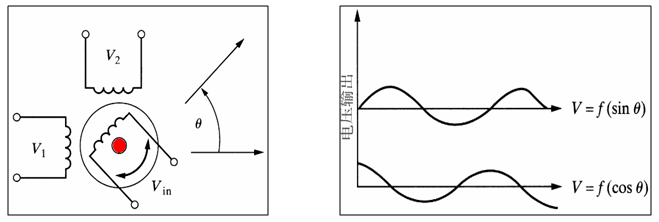
图9.22旋转变压器 图9.23机械转角与电压输出曲线图

