
【案例导入】
近些年,国家大力推动物联网建设,更是作为国家战略来发展。物联网可分为三层:感知层、网络层和应用层,如图9.1所示。感知层的作用相当于人的眼耳鼻喉和皮肤等神经末梢,它是物联网识别物体、采集信息的来源,其主要功能是识别物体,采集信息。网络层相当于人的神经中枢和大脑,负责传递和处理感知层获取的信息。应用层是物联网和用户的接口,它与行业需求结合,实现物联网的智能应用。
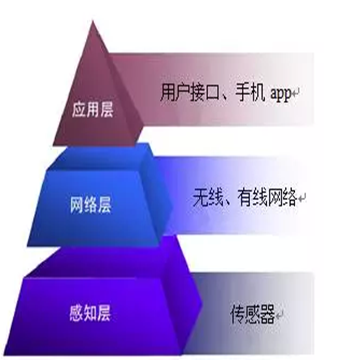
图9.1 物联网的建设
1.传感器的定义
传感器(transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。
传感器的工作原理如图9.3所示:
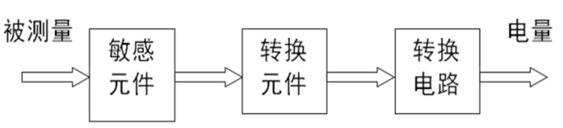
图9.3 传感器工作原理示意图
2.传感器的分类
1)按检测状态分类:
传感器分为内部传感器和外部传感器两种。
内部传感器是用于测量机器人自身状态参数(如手臂间角度等)的功能元件。其通常由位置、速度及加速度传感器等组成。
外部传感器用于测量与机器人作业有关的外部信息ꎬ 这些外部信息通常与机器人的目标识别、作业安全等有关。
2)按工作原理分类:
这种分类方法是以检测器件的工作原理命名的,如应变式、压电式、压阻式、热点式检测器件等。
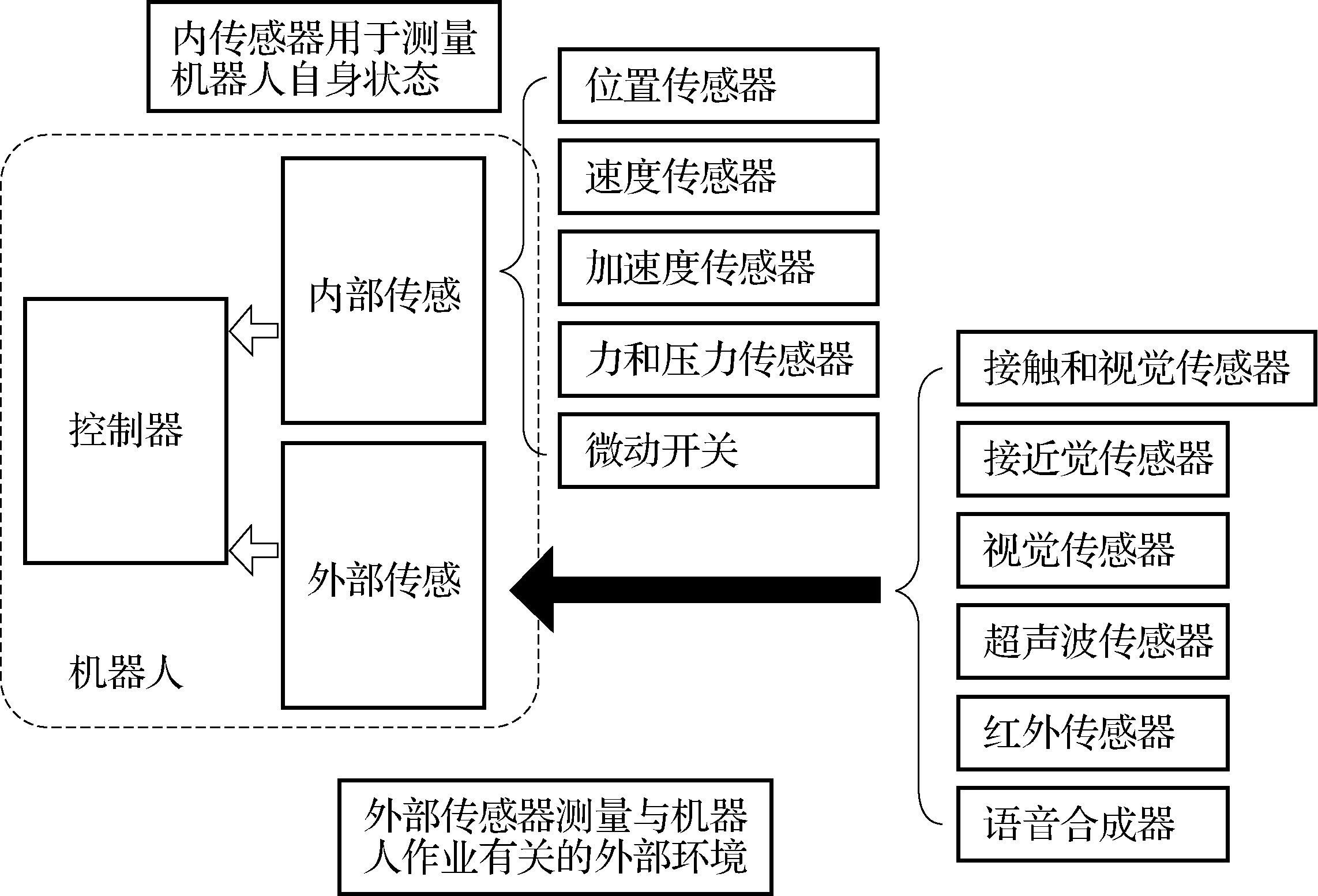
图9.4 传感器按测量状态分类示意图
3.传感器的性能指标
1)灵敏度:灵敏度是指传感器的输出信号达到稳定时,输出信号变化与输入信号变化的比值。
2)线性度:线性度是指传感器输出信号与输入信号之间的线性程度。
3)测量范围:测量范围是指被测量的最大允许值和最小允许值之差。
4)精度:精度是指传感器的测量输出值与实际被测量值之间的误差。
5)重复性:重复性是指传感器在对输入信号按同一方式进行全量程连续多次测量时,相应测试结果的变化程度。
6)分辨率:分辨率是指传感器在整个测量范围内所能辨别的被测量的最小变化量,或者所能辨别的不同被测量的个数。
7)响应时间:响应时间是传感器的动态特性指标,是指传感器的输入信号变化后,其输出信号随之变化并达到一个稳定值所需要的时间。
8)抗干扰能力:通常抗干扰能力是通过单位时间内发生故障的概率来定义的,因此它是一个统计指标。
在选择工业机器人传感器时,需要根据实际工况、检测精度、控制精度等具体要求来确定所用的传感器的各项性能指标,同时还需要考虑机器人工作的一些特殊要求,比如重复性、稳定性、可靠性、抗干扰性要求等,最终选择出性价比较高的传感器。
4.传感器的发展动向
机器人技术的发展大致经历了以下三个时期:
(1)第一代示教再现机器人
它不配备任何传感器,一般采用简单的开关控制、示教再现控制和可编程序控制。
(2)第二代感觉型机器人
此种机器人配备了简单的内外部传感器,能感知自身运行的速度、位置、姿态等物理量,并以这些信息的反馈构成闭环控制。
(3)第三代智能型机器人
智能型机器人目前尚处于研究和发展之中,它具有多种外部传感器组成的感觉系统,可通过对外部环境信息的获取、处理,确切地描述外部环境,自主地完成某项任务。
总的来说,传感器有如下发展趋势:
(1)研发新型传感器
新型传感器是指:1)采用新原理;
2)填补传感器空白;
3)仿生传感器等方面。
(2)开发新材料
新型传感器材料有:
1)半导体敏感材料;
2)陶瓷材料;
3)磁性材料;
4)智能材料等。
(3)采用新工艺
微细加工技术,又称微机械加工技术(MEMS)。它是将离子束、电子束、分子束、激光束和化学刻蚀等用于微电子加工的技术,目前已越来越多地用于传感器领域。
(4)面向集成化、多功能化
(5)面向智能化发展

