
机构的位置分析是求解机构的输入与输出构件之间的位置关系,这是机构运动分析的最基本的任务,也是机构速度、加速度、受力分析、误差分析、工作空间分析、动力分析和机构综合等的基础。由于并联机构结构复杂,对并联机构进行位置分析要比单环空间机构的位置分析复杂得多。
1.位置反解
当已知机构主动件的位置,求解机构的输出件的位置和姿态称为位置分析的正解,若已知输出件的位置和姿态,求解机构输入件的位置称为机构位置的反解。
这里以6—SPS并联机构为例讨论并联机构的位置反解方法。6—SPS并联机构的上下平台以6个分支相联,每个分支两端是两个球铰,中间是一移动副。驱动器推动移动副作相对移动,改变各杆的长度,使上平台变化在空间的位置和姿态。当给定上平台在空间的位置相姿态,求各个杆长,即各移动副的位移,这就是该机构的位置反解。
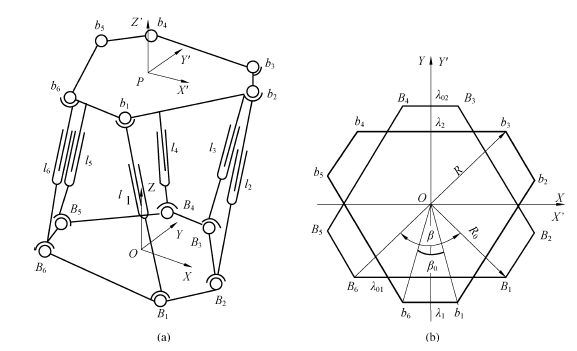
6—SPS并联机构
(a) 机构简图;(b) 坐标系示意图

2. 位置正解的数值方法
在机构的运动分析中,并联机构的位置正解分析是最基本也是最困难的。分析并联机构位置正解的方法很多,概括起来有迭代法、解析法、同伦算法和数学机械化方法。迭代法的特点是求解速度较快,缺点是需要选取比较接近真实解的初始值;解析法的优点是不需选定初值,可求出所有位置正解,该方法具有推导过程复杂、技巧性较强的缺点;同伦算法的优点是无需将位置正解的非线件方程组消元至一元代数方程,也不需选取初值且可求得所有解。缺点是求解速度很低;数学机械化法的优点是在整个计算过程中不需要巧妙的构思和复杂的理论推导。
下面讨论一种用于6—SPS机构位置分析的三维搜索法。

首先将6—SPS机构的非线性方程组的未知数个数通过数学处理降为3个。即将方程组(8.14)的6个独立方程分为3组,即

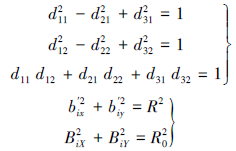
在每组两个方程之间进行相加、相减,会得到另外形式的6个独立方程。在进行化简时,应注意机构各铰链点之间存在如下的关系

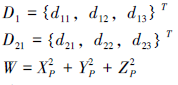
式中:
为使方程进一步简化,将方程中各项展开,并利用如下诸关系式:
在每组两个方程之间进行相加、相减,会得到另外形式的6个独立方程。
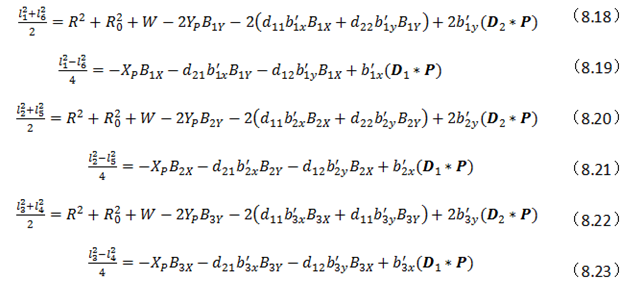
式中:
式(8.18)—(8.23)中的6个独立方程已比原式(8.14)化简了许多,再将式(8.18)、(8.20)、(8.22)作为一组,将式(8.19)、(8.21)、(8.23)作为一组,并利用下面关系式:
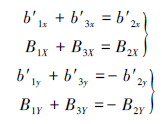
将式(8.19)减去式(8.21)再减去式(8.23)得:

将式(8.19)x方向的分量乘以减去式(8.21)x方向的分量乘以
并整理得:

将式(8.18)加上式(8.21)再加上式(8.23)得:

将式(8.18)x方向的分量乘以减去式(8.20)x方向的分量乘以
并整理得:

式(8.26)~(8.29)中:
(i=0,1,2,3, 4;j=0,1,2,3,4,5)只与输入量(杆长)和基本尺寸有关,是与输出量,即机构的位置和姿态无关的常量,具体表达如下:
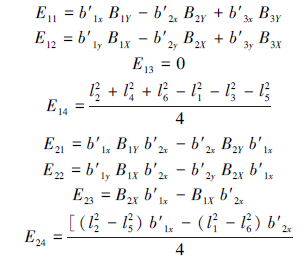
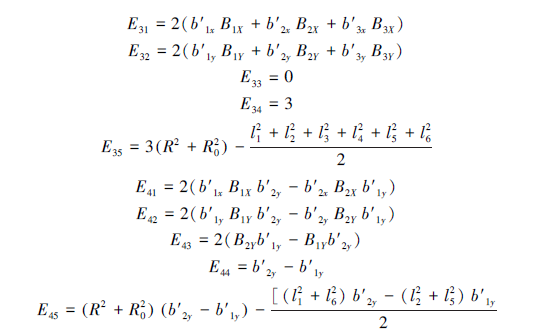
具体形式由线性方程组(8.26)和(8.27)可得


