
并联机构自由度的计算
上一节
下一节
若在三维空间中有n个完全不受约束的物体,并且任选其中的一个为固定参照物,因每个物体相对参照物都有6个运动自由度,则n个物体相对参照物共有6(n一1)个运动自由度。若在所有的物体之间用运动副联接起来,设第i个运动副的约束为ui,此约束可以是1和5之间的任何数,如果所有n个物体之间的运动副数目为g,则这时的运动自由度应减去所有的约束数的总和,为机构的自由度,即

这里M表示自由度。在一般情况下,式中的可以用(6-
) 代之,
为第i个运动副的相对自由度数。则有Kutzbach Grubler公式:
例一 计算下图所示的空间多环机构的自由度。
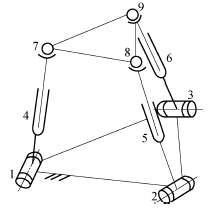
由图可知,该机构的总的构件数M=8。运动副数=9,其中运动副1~3为转动副,其自由度皆为1,运动副4~6为移动副,它们的自由度也为1,运动副7~9是球面副,每个球面副的自由度为3,所以,则有:

对于多环空间机构,自由度计算公式还可以写成更加方便的形式
注意:上述公式只适用于公共约束为零,即不具有公共约束的情况。而熟知的平面机构及球面机构的自由度计算公式,则对应公共约束为3。
对于更为普遍的情形,机构可能具有从零到6之间任何数目的公共约束,机构的自由度可以表示为更加一般的形式。
式中,d为机构的阶数。
例二 计算下图所示的平面机构的自由度。
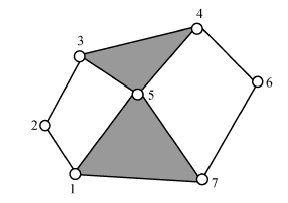
对于平面机构d=3,该机构有两个独立的环路,即L=2,并且所有的运动副都为单自由度的转动副,则:

注意,用观察法确定并联机器人的自由度时,需要先确定各分支对于动平台的约束之和。

