
并联机构是由运动副和构件按一定方式连接而成的闭环机构,其动平台或称末端执行器通过至少两个独立的运动链与机架相连接。必备的要素如下:
(1) 末端执行器必须具有运动自由度;
(2) 末端执行器通过几个相互关联的运动链或分支与机架相连接;
(3) 每个分支或运动链由唯一的移动副或转动副驱动。
常见的并联机构有Stewart平台、Delta并联机器人和Tricept机器人,下面对这几种机构的组成、工作原理和应用加以介绍。
1.Stewart平台
在1965年,Stewart提出—种新型的、6 自由度的空间并联机构,它由上下两个平台和6个并联的、可独立自由伸缩的杆件组成ꎬ 伸缩杆和平台之间通过两个球铰链A、B、C、D、E、F 和a、b、c、d、e、f 连接,称为Stewart平台,如下图所示。从图中可见,如果将下平台作为定平台,以伸缩杆的位移作为输入变量,则可以控制上平台(动平台) 的空间位移和姿态。这种新型的、6 自由度的空间并联机构引起众多研究者的兴趣,经过30 多年的不断改进和发展,演变出不同运动学原理和结构的空间并联机构,并在许多科学研究和工业领域获得了广泛应用。
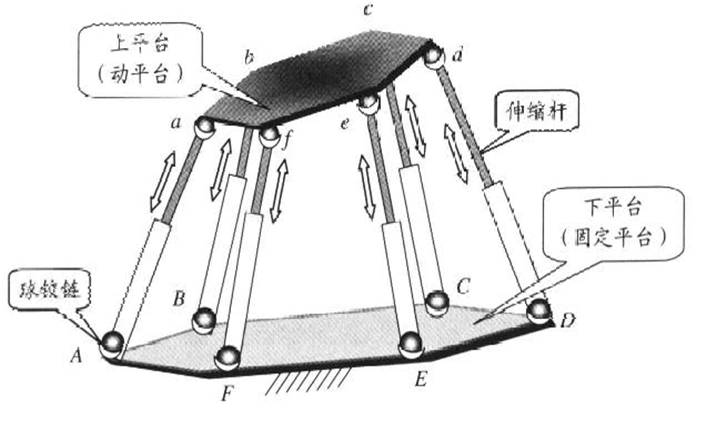
Stewart平台的工作原理
2.Delta并联机器人
Delta并联机器人有两种典型的结构,一种为3自由度结构,一种为6自由度机构。3自由度的Delta并联机器人由3组连杆机构和摆动控制臂连接固定平台(上平台)和动平台(下平台),其结构如下图所示。
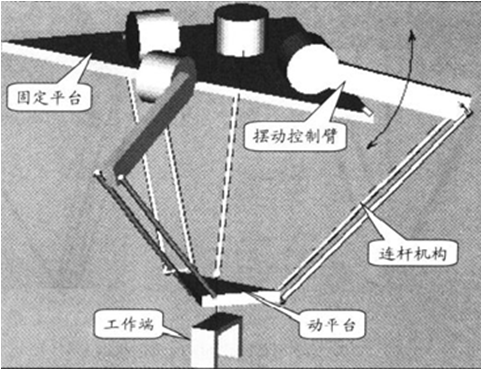
三自由度Delta并联机器人
6自由度的Delta并联机器人由6组连杆机构和摆动控制臂连接固定平台(上平台)和动平台(下平台),其结构如下图所示。
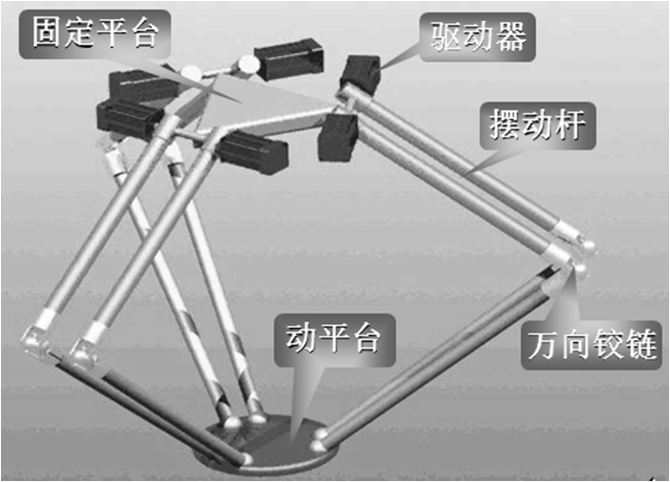
六自由度Delta并联机器人
Delta并联机器人的应用
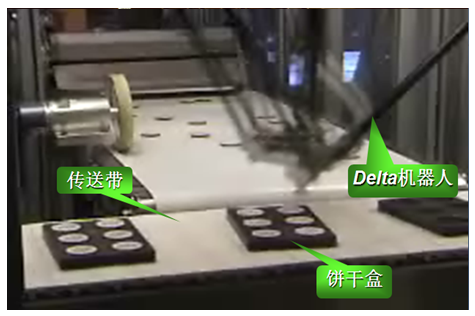
Delta并联机器人用于饼干包装
3.Tricept机器人
瑞典Neos Robotic公司开发和生产的Tricept系列并联机器人是并联机构的另一成功范例。Tricept并联机器人主要有TR 600S型和TM 605型,其外观如下图所示。从图中可见,Tricept并联机器人是3 杆并联机构,3 根伸缩杆的外壳通过球面支撑固定在上平台机架上,3根伸缩杆通过球铰链与下平台(动平台) 相连接。动平台上安装有工作端,其腕关节可以绕水平和垂直轴线转动,通过并联运动和串联运动的综合,实现5-6 坐标联动。工作端上可以安装机械手的夹爪,完成各种装配工序,或安装大功率的高速主轴,进行铣削、钻削和磨削。
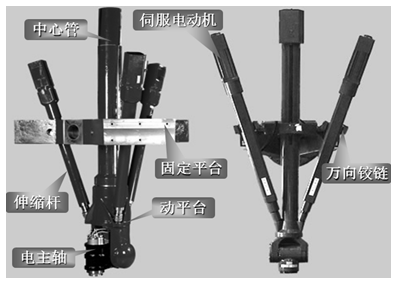
Tricept并联机器人
Tricept并联机器人主要用于汽车装配自动线,可以完成加工、装配、焊接等工序。下图所示为Tricept并联机器人加工飞机零件。此外,它还可作为模块化制造系统的组成部分,完成切削和激光加工。
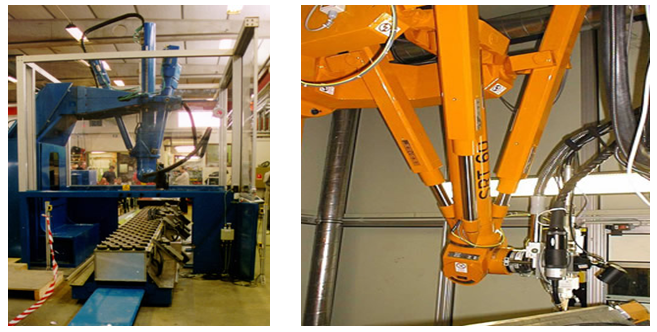
Tricept并联机器人加工飞机零件 Tricept并联机器人激光加工

