
【案例导入】
在食品工厂的分拣包装车间里,对一种新口味饼干的分拣工作正在井然有序地进行着。在流水线上,散乱放置的饼干不断被传送带传递到分拣区域,而几名“三头六臂”的特殊员工正不断将一块块饼干快速而精准地抓取起来,再整齐地码放在旁边的包装盒内,整套动作迅速而有条不紊,如图8.1所示。

图8.1 并联机器人食品包装
1. 并联机器人的定义
并联机器人(Parallel Manipulator)由动平台、定平台以及连接它们的两个或者两个以上的独立运动支链组成,末端定平台具有两个或两个以上自由度的可控执行器。
并联机构的命名一般为开头的数目字表示机构的分支数,后边的字母表示分支运动链的结构,一般用支链的运动副来描述,R代表转动副,P代表移动副,S代表球副,U代表万向节。如图8.2所示,该机构由六条支链,每条支链的运动副为球副—移动副—球副,因此该机构命名为6—SPS机构。再比如图8.4为三条支链的并联机构。
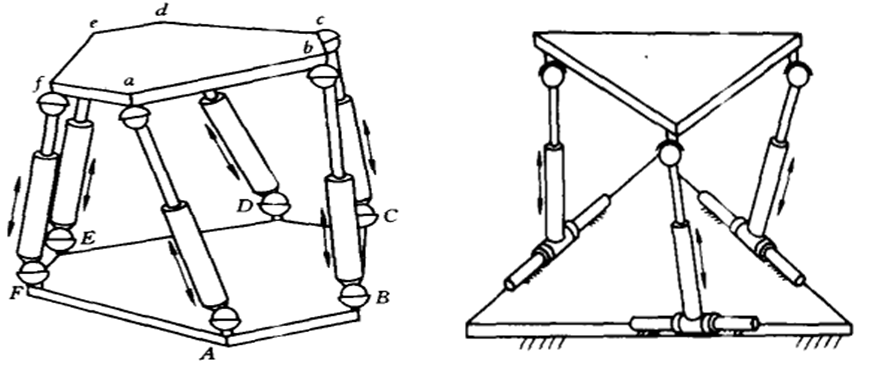
图8.2 6-SPS机构 图8.4 3-RPS机构
2.并联机器人的历史
并联机构的出现可以追溯到1931年,Gwinnett获得了并联机构式的娱乐设备的专利授权,此专利是国际上有记载的第一个关于并联机构的发明专利。1934年,Pollard提出了一种空间作业并联机构,并于1940年获得了用于汽车喷漆装置的并联机构专利,如图8.6所示。
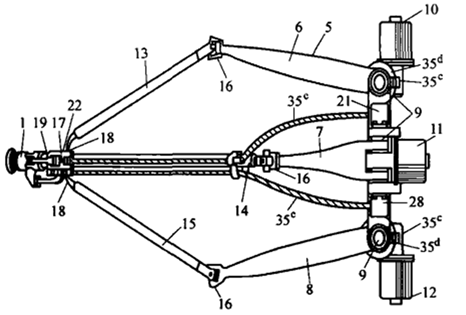
图8.6 pollard的并联机构
1962年,Gough发明了一种基于并联机构的六自由度轮胎检测装置,如图8.7所示。
三年后,Stewart首次对Gough发明的这种机构进行了机构学意义上的研究,并将其推广应用为飞行模拟器的运动产生装置,如图8.8所示。
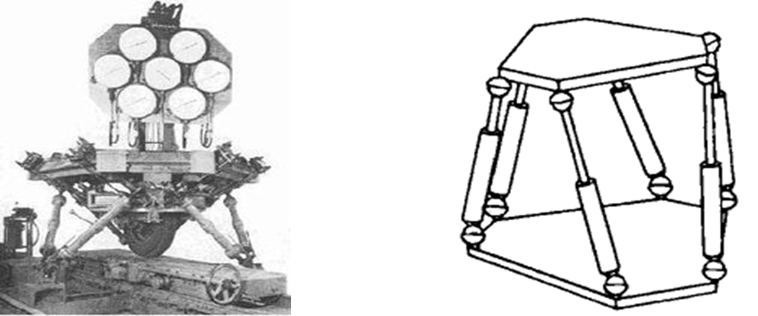
图8.7 Gough并联机构图 图8.8 Stewart 并联机构
1978年,Hunt首次提出把六自由度并联机构作为机器人操作器,由此拉开了并联机器人研究的序幕,但在随后的近十年里,并联机器人的研究似乎停滞不前。
在国内,黄真教授等人于1990年研制出我国第一台六自由度并联机器人样机,见图8.9。1994年研制出一台柔性铰链并联式六自由度机器人误差补偿器,见图8.10。
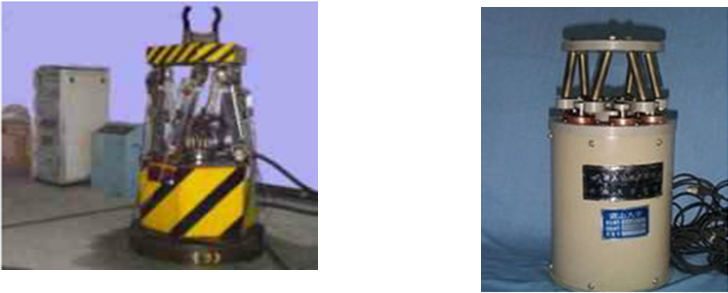
图8.9我国第一台六自由度并联机器人 图8.10六自由度机器人误差补偿器
3.并联机器人的特点
(1)并联机器人驱动装置可以安放在基座或接近基座的位置,故其运动部件的质量和惯量可以大大减小,因此动态性能好,可以实现高速运动。
(2)并联机器人一般可以实现基座驱动器的良好密封,故可以工作在诸如高温、辐射、潮湿、太空和水下等恶劣的环境下。
(3)并联机器人运动学反解容易计算而正解相当复杂,故在工作空间中进行并联机器人的位置控制较容易。
(4)并联机器人由于不存在驱动器累积误差,其位置精度较高。
(5)并联机器人的运动平台通过几个运动链以并联方式与基座相连接,因此承载能力强、刚性好、结构紧凑。
(6)并联机器人机构通常采用对称式结构,故具有较好的各向同性。
(7)并联机器人具有运动学奇异和力奇异,在奇异点处,机器人可能失去约束度,即获得额外的自由度。
(8)工作空间小、可操作性差是并联机器人的缺点。
4.并联机器人的应用
(1)并联机床
并联机床制造、加工、控制、标定等技术的快速发展,促进了并联机构学的发展和进步。国内外许多企业和科研单位也研发了大量的并联机床样机,且部分已实现商品化和应用于工业加工中的诸多方面。1997 年,清华大学和天津大学合作研制出国内第一台并联机床样机VAMTIY,如图8.11所示。1998年哈尔滨工业大学研制了一台并联机床原型样机,如图8.12所示。

图8.11 清华大学并联机床 图8.12 哈尔滨工业大学并联机床
(2)动态模拟
动态模拟器是并联机构应用最早的装备之—,但现在仍然具有广阔的市场,主要包括娱乐、飞行训练、地震和振动模拟、空间对接过程模拟等装置的动态模拟器。模拟器可以让驾驶员不需要使用真实的机械装备就可感受真实的驾驶环境,极大地降低了培训成本、提高了培训效率。如Frasca公司生产的s—92型飞行模拟器,如图8.13所示。

图8.13 飞行模拟器
(3)医疗器械
在医疗领域,由于要求定位精度高,避免人工可能出现的颤抖,将并联机器人用于显微外科手术。例如, 哥伦比亚大学研制的RSPR型并联机器人,用于操纵手术器械;洪堡大学手术机器人实验室用Delta 型并联机构开发出手术机器人(图8.14所示) 等。
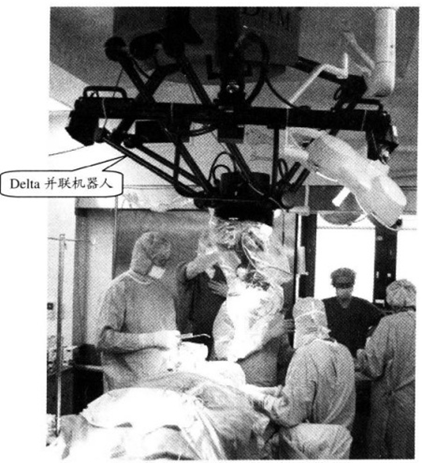
图8.14 洪堡大学手术机器人实验室的现场实况
(4)工业机器人
在20世纪80年代,瑞士格桑工学院(EPFL)的Clavel首次提出Delta并联机构,随后,该机构被ABB 公司开发为工业机器人,并广泛用于化妆品、食品和药品的生产与包装,取得了明显的经济效益。此外,在国内,天津大学研制了用于电池装配线的高速并联机器人,如图8.16所示。
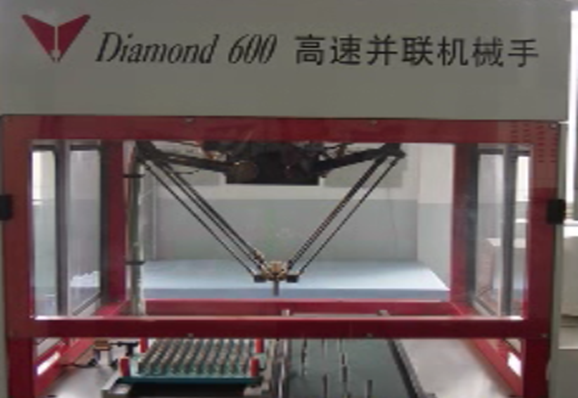
图8.16 电池装配线的高速并联机器人
(5)微纳操作
并联机器人的动平台由多个支链支撑,无累积误差,精度高,因而适合用于微纳操作装备。国内许多科研单位也对微操作机器人系统进行了研究,并取得重要成果。如哈尔滨工业大学研制了面向光纤耦合作业的微操作机器人系统,如图8.17所示。
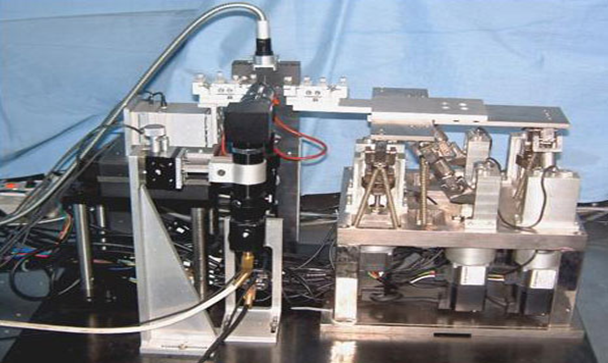
图8.17 六自由度精密并联机器人
(6)力与力矩传感器
燕山大学和上海交通大学提出用弹性铰链代替球副设计出力敏元件非组装结构六维力与力矩传感器,缩小了传感器结构的尺寸,提高了传感器的灵敏度和精度,拓展了并联六维力与力矩传感器的应用范围,如图8.18所示。
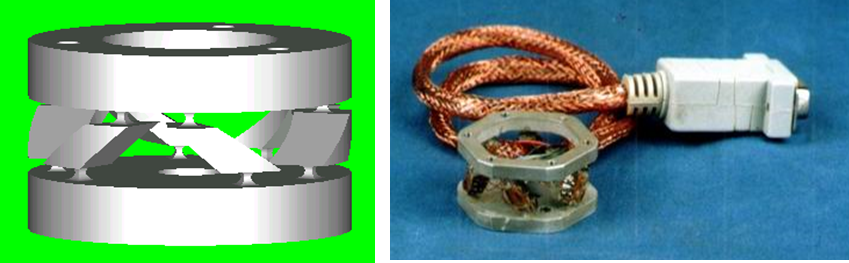
图8.18 六维力与力矩传感器

