
灵巧手的静力学分析
上一节
下一节
1、灵巧手静力学分析
静力学分析就是假定各关节“锁住”力与手部所支持的载荷或受到外界环境作用的力达到静力学平衡。如图7.15所示,抓取球体时,各个手指的弯曲情况简图。由力矩和力的平衡方程可求出拇指、食指和中指指端的受力,然后再通过静力学分析求出手指各关节上的受力情况。
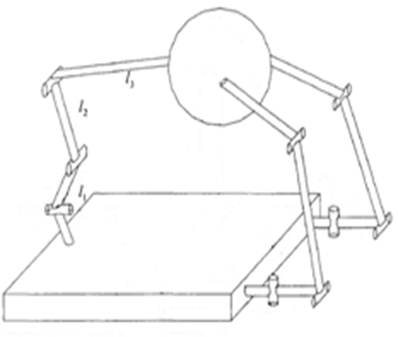
图7.15 抓取球体时,各个手指的弯曲情况简图
2、单个手指各关节受力分析
将手指的三个关节简化成为三根通过铰链连接的刚性杆,在二维平面内弯曲角度坐标,如图7.17所示,各关节弯曲的角度分别是:θ1,θ2,θ3。
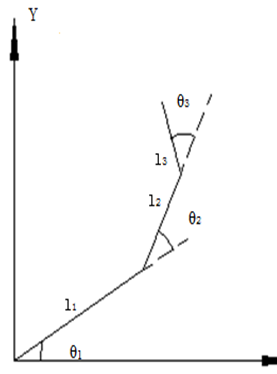
图7.17 手指坐标系图
(1)手指关节3处轴的受力分析及其转矩计算
对杆3进行受力及力矩分析,杆3的受力如图7.18,设杆3与x轴之间的夹角为68°,由力的平衡条件可知:
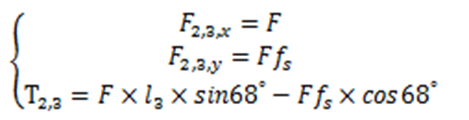
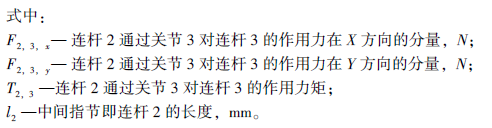

图7.18 末端指节杆3受力分析
(2)关节2处轴的受力分析及其转矩计算
中间直接连杆2的受力分析如图7.19,设杆2与x轴之间的夹角为65°,由平面中力的平衡条件可知:
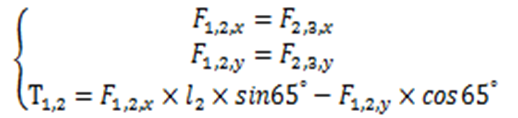
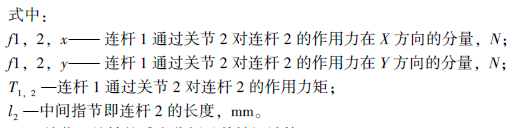

图7.19 中间指节连杆2受力分析
(3)关节1处轴的受力分析及其转矩计算
连杆1的受力分析如图7.20,设杆1与x轴之间的夹角为30°,由平面中力的平衡条件可知:
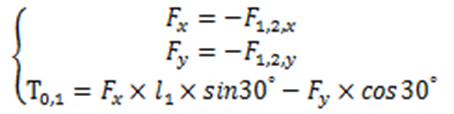
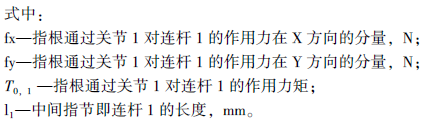
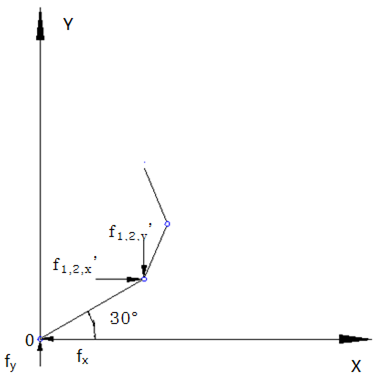
图7.20 近指节连杆1受力分析

