
三指位姿方程的逆向解
上一节
下一节
运动学逆问题就是己知手指坐标系相对与手掌坐标系的期望位置和姿态,计算一系列满足期望要求的关节角。
1、拇指的运动学逆解
为了集中讨论逆运动学问题,我们先简单化考虑,求出单指坐标的逆向解。
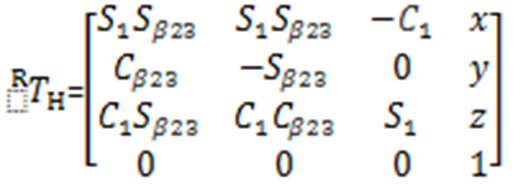
拇指末端的坐标为(x、y、z),由于β角是在设计机构时就己经确定的,是已知值。根据前面对单指坐标的正向求解,由拇指的运动学方程式可将它改写为:
拇指坐标的平面坐标系如图7.12所示:

大拇指简化坐标系
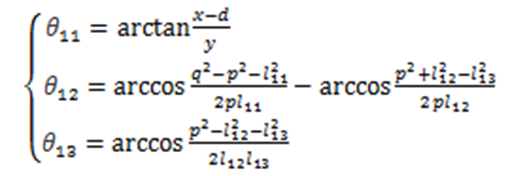
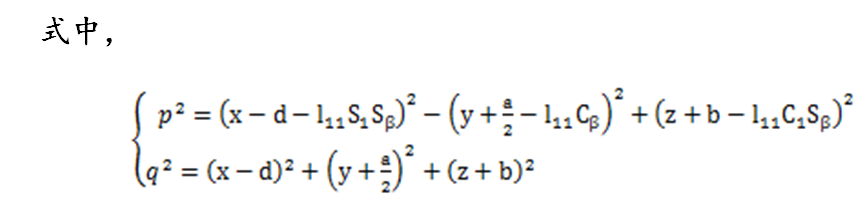
由拇指坐标系与手掌坐标系的变换关系,可得在手掌坐标系下的逆解。
2、 食指和中指的运动学逆解
给定食指末端点的位姿,求出能实现这一末端位姿的一组关节输入角的过程即为其位姿方程的逆向解。由食指的运动空间和坐标位置可以看出,关于z坐标的值为都为0,即我们可以在xy平面求解,设定末端点p的位姿为(,
,
),如图7.14所示,其中:
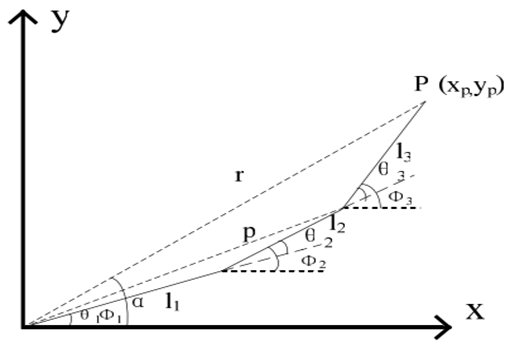
食指简化坐标系

