1、坐标系的标准命名
为了规范起见,有必要给灵巧手和操作空间专门命名和确定专门的“标准”坐标系。
基坐标系{B}:基坐标系位于灵巧手的基座上,它仅是赋予坐标系{O}的另一个名称。它固连在灵巧手上的静止部位,是其他坐标系的参考标准。
手指坐标系{W}:包括拇指、食指、中指的坐标系。
目标坐标系{G}:目标坐标系是对被抓取的物体的具体位置进行描述,灵巧手在抓取物体动作结束时,手指坐标系的末端关节应于目标坐标系重合。
2、 三指位姿方程的正向解
首先,我们建立如图7.10所示的手掌坐标系,其中,oxyz为手掌坐标系,即基坐标系;o1 x1 y1 z1 为拇指根坐标系;o2 x2 y2 z2 为食指根坐标系;o3 x3 y3 z3 中指根坐标系; og xg yg zg 为被抓物体坐标系,即目标坐标系。
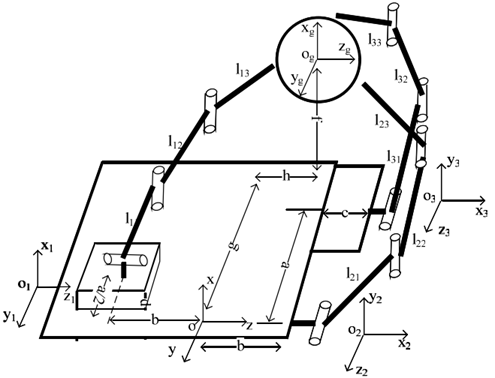
图7.10 手掌坐标系
1)拇指
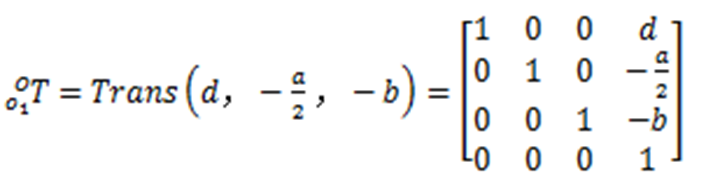
由图7.10所示,根据拇指与基坐标的关系,从{o}坐标系到{}坐标系,是将手掌坐标系沿z轴平移-b,沿x轴平移d即可。所以齐次变换矩阵为:
2)食指
根据食指与手掌坐标的关系,从{o}坐标系到{o₂}坐标系,即先沿z轴平移b,然后绕n轴旋转-90°,再绕轴a旋转-90°即可。所以

3)中指
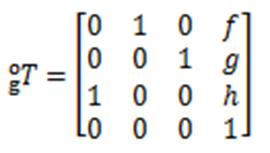
同理,由图7.10所示,根据中指与手掌坐标的关系,从{o}坐标系到{o₃}坐标系,即先沿z轴平移(b+c),沿y轴平移-a,然后绕n轴旋转-90°。再绕轴a旋转-90°即可。所以齐次变换矩阵为:

3、指端球面中心坐标系表示
根据被抓物接触位置,以及己知接触点处的法线方向和各指端球面半径,可求出指端球面中心的坐标表示,如图7.11所示。
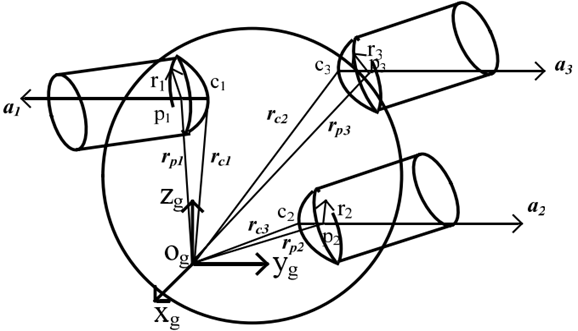
图7.11 被抓物与三指端关系坐标系
由图7.11可知,可由以下三式求出:
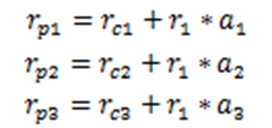
为求出指端球面中心在手掌坐标系统的表示,必须明确被抓物坐标系与手掌坐标系间的坐标转化关系。从图7.11可看出,从被抓物坐标系到手掌坐标系的变化为: