单指机构的运动学模型
上一节
下一节
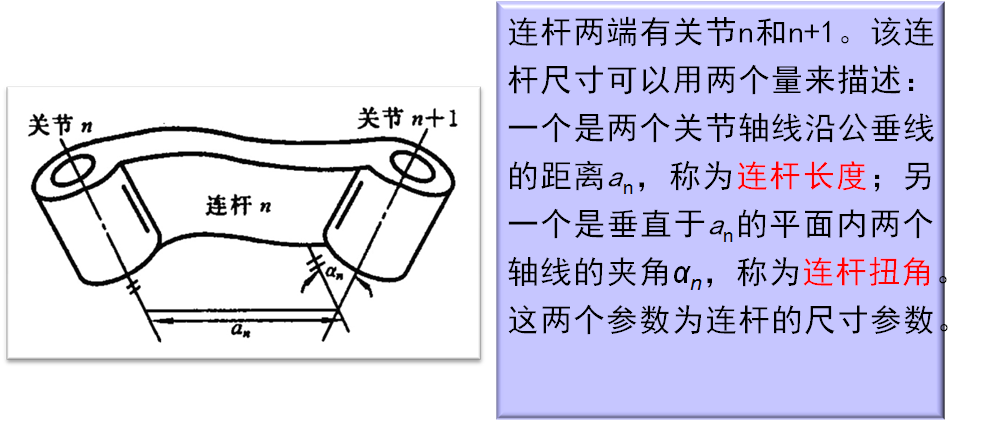
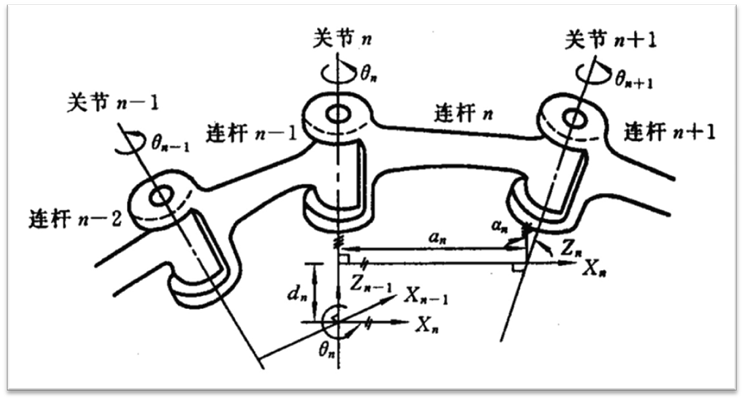
考虑连杆n与相邻连杆n-1的关系,若它们通过关节相连,其相对位置可用两个参数以和以来确定,其中dn是沿关节n轴线两个公垂线的距离。θn是垂直于关节n轴线的平面内两个公垂线的夹角。
![]()
对于转动关节,θi为关节变量,其他三个连杆固定不变; 对于移动关节, di为关节变量,其他三个连杆固定不变;这种用连杆参数描述机构运动关系的规则称为Denavit-Hartenberg参数,所以对于一个6关节机器人,需要用18个参数就可以完全描述这些固定的运动学参数,可用6组(ai, αi , di) 表示。
首先,根据D-H规则,建立单指机构的坐标系,如图7.8所示。
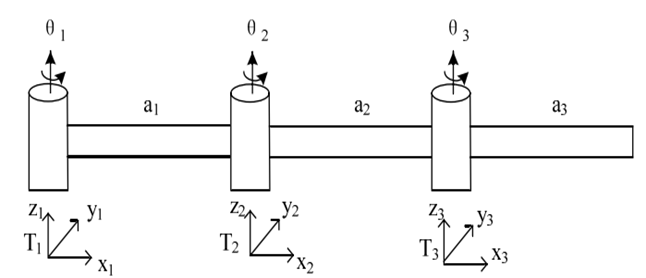
图7.8 食指坐标系
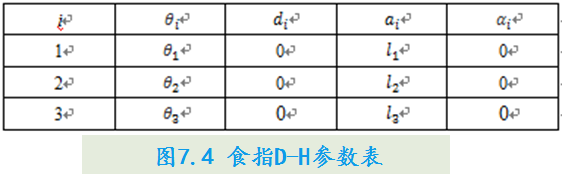
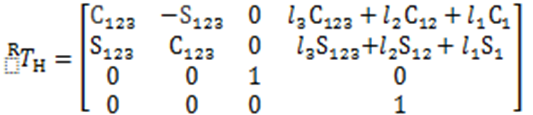
如图7.4所示,食指D-H参数表建立变换矩阵:

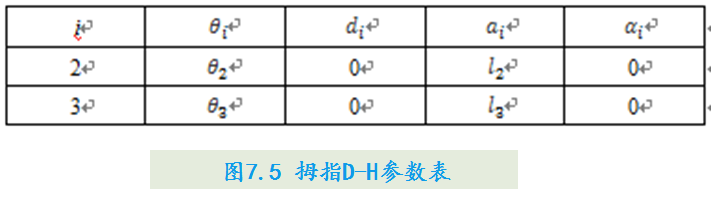
拇指的坐标系如图7.5所示。
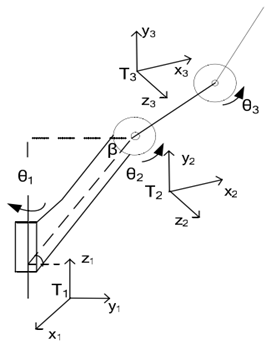
图7.5 拇指坐标系