
多指灵巧手的结构设计
上一节
下一节
【案例导入】
据目前的残疾人数据调查表明,我国肢体残疾患者的数量高达2412万人,约占总人口数的1.83%。因此假肢手的研究对于残疾人能够进行正常的生活和更好地融入社会非常重要,得到了社会各界的高度重视。上海交大机器人研究所研发出一种新的仿人假肢手。如图7.1所示。

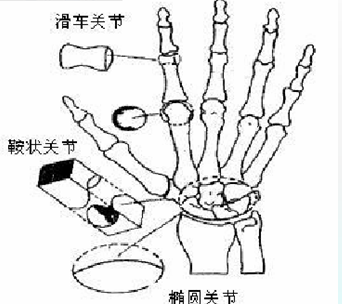
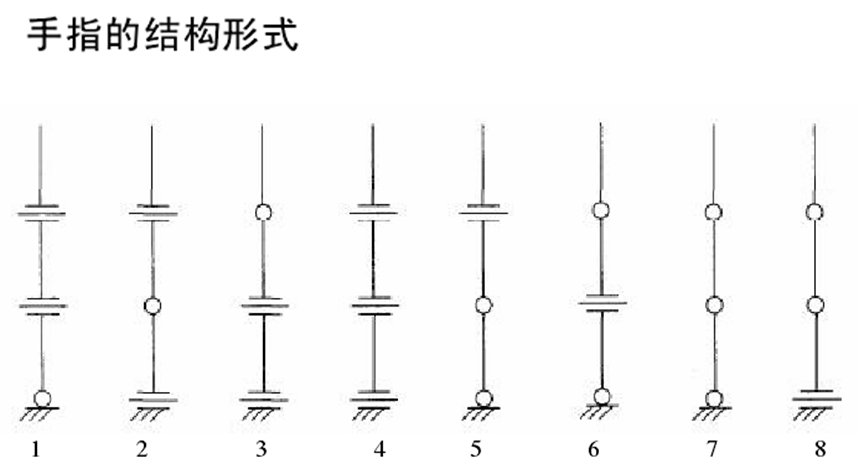
1、手指关节运动副的形式
1、单轴关节:滑车关节和车轴关节两种;
2、双轴关节:椭圆关节和鞍状关节两种;
3、三轴关节:球窝关节。
2、手指数目
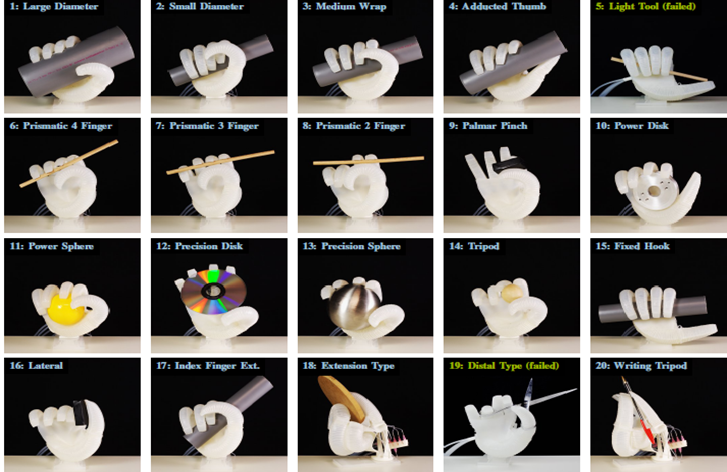
由图可知大部分的抓取任务可以用两个虚拟指来完成,而对于一些诸如高精度的圆球、圆盘等抓取,可以引入第三虚拟指来提高其稳定。因此,有三个虚拟指的手爪其抓取是绝对可靠的。一般灵巧手采用3—5个手指。
3、灵巧手关节驱动方式与传动方式
灵巧手的驱动方式有:电驱动、气压驱动和液压驱动的方式,少数的灵巧手采用SMA(形状记忆合金)驱动、压电陶瓷驱动和PMA(气动人工肌肉驱动)等新型驱动技术。
灵巧手的关节传动方式有:绳加滑轮传动、连杆机构传动、齿轮传动、带传动、链传动等传动方式。
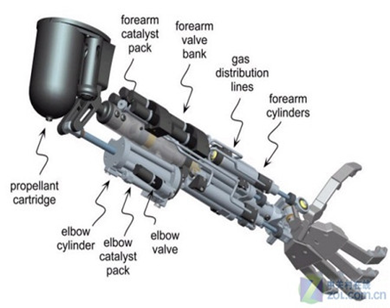
图7.2 液压驱动方式
4、多指灵巧手的设计
(1)手指各关节杆的截面型式和材料:截面形式主要有圆形、方形、椭圆形和复合形状。手指的结构材料一般选用铝合金。
(2)传感器的选用和布置:传感器主要有力觉、接触觉、压觉、温度觉等的传感器。传感器的布置应满足均匀分布、对灵巧手的正常操作影响最小、非测量部分尽量隐藏等条件。
(3)手指各关节的尺寸和回转角范围:灵巧手尺寸应根据分析和优化得出合适的关节长度比例,人手指根关节的屈伸角度极限一般是90°,中间关节的屈伸角度极限一般为110°,末关节的屈伸角度一般为80°。

