
步行机器人可以认为是“一种由计算机控制的用足机构推进的表面移动机械电子装置。
步行机器人具有独特的功能:
(1)足运动方式具有较好的机动性
(2)足运动系统可以主动隔振,即允许机身运动轨迹与足运动轨迹解耦。尽管地面高低不平,机身运动仍可做到相当平稳。
(3)足运动系统在不平地面和松软地面上的运动速度较高,而能耗较少。
步行机器人主要设计难点是机器人跨步时自动转移重心而保持平衡的问题。步行机器人用于工程探险勘测或军事侦察等人类无法完成的或危险的工作;也可开发成娱乐机器人玩具或家用服务机器人,具有广泛的适应性。
1、步行机器人的腿机构
从运动角度出发,腿机构一般处于支撑状态相对于机身走直线轨迹,同时支撑足驱动协调运动和机身姿态的控制。腿机构必须具备与整机重量相适应的刚性和承载能力。但结构不能过于复杂,否则会导致结构和传动的实现发生困难。
步行机器人腿机构分为开链机构和闭链机构两大类。开链机构的特点是工作空间大,结构简单,但承载能力小。闭链机构一般刚性好,承载能力大,但工作空间有局限性。图6.27所示的是美国卡内基-梅隆大学开发的六足开链步行机器人,图6.28所示的是美国Santa Class的FMC公司开发的6足开链步行机器人。图6.29所示的是日本东京工业大学研制的4足闭链步行机器人,,图6.30所示的是日本东芝公司研制的6足闭链步行机器人。
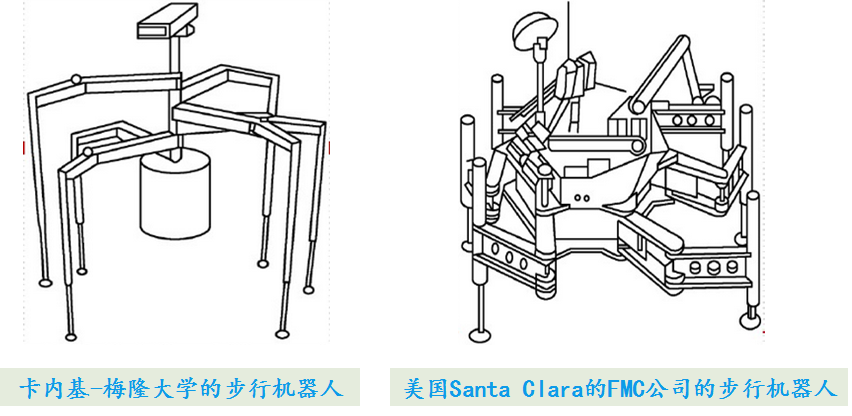
图6.27 图6.28
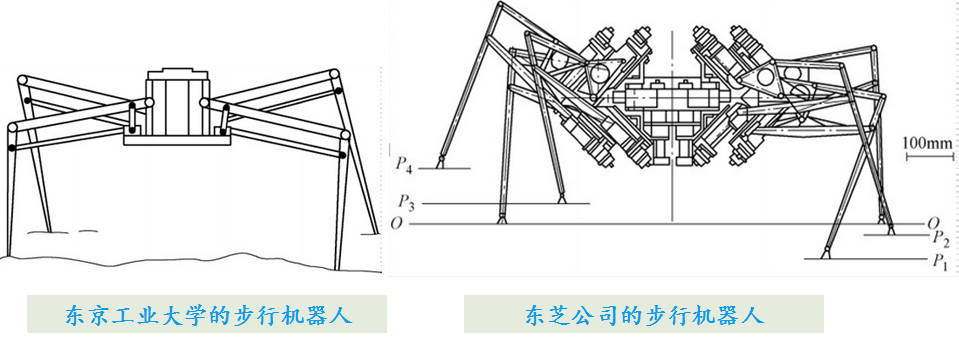
图6.29 图6.30
2、步行机器人步行机器人的发展过程
1968年,美国的R. Smosher试制了一台叫“Rig”的操纵型双足步行机器人机械,从而揭开了仿人机器人研制的序幕。
1969年,日本早稻田大学加藤一郎教授研制出WAP-1平面自由度步行机。利用人造橡胶肌肉为关节,通过注气、排气关节转动从而迈步。
1996年,日本本田公司推出P2型机器人。采用无线遥控技术,使其能够完成诸如速度达到3km/h的动态行走、上下楼梯及推运物体等。
1997年,日本本田公司推出P3型双足步行机器人,如图6.33所示。基本上与P2 型相似,是在质量和高度上有所降低,且使用了新型的镁材料。
2000年,本田公司推出了新型双脚步行机器人ASIMO,如图6.34所示。采用了新开发的技术“I-WALK”,可以更加自由地步行。
2000年,日本索尼推出了人形娱乐型机器人“Sony Dream Robot-3X”,它每分钟可以步行15m,并可按照音乐节拍翩翩起舞,可以进行较高速度的自律运动。
日本还有许多其他科研机构和高等院校从事仿人机器人的研制和理论研究工作(如松下电工、富士通、川琦重工、日立制作所等单位),他们都在仿人机器人的研制和理论研究方面,取得了一定成就。
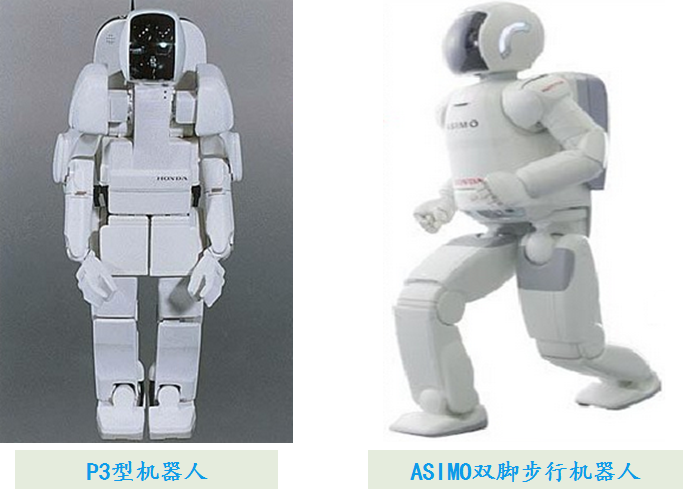
图6.33 图6.34
3、两足步行机器人动力学模型
两足步行机器人系统是相当复杂的多变量时变非线性系统。其复杂程度与两足机器人的自由度多少有关。利用拉格朗日方程建立的两足步行机构WL-3型的动力学模型,机构模型如图6.35所示。为简化分析,做如下假设:
(1)腿只在前进平面内运动;
(2)腿由刚性杆件构成,杆件之间用关节连接,关节轴与运动平面正交,各杆件质量均布。
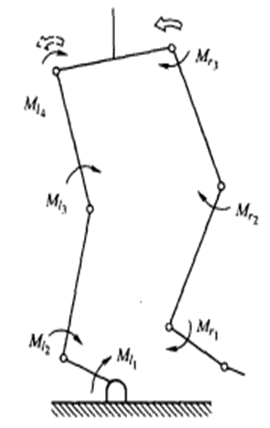
图6.35 两足步行机器人机构模型
这一模型中,每条腿有4个自由度,分别为髋关节、膝关节、踝关节和脚尖关节。当腿处于支撑相时,按3自由度倒立摆处理;当腿处于悬空相时,以3自由度复摆处理,如图6.36所示。
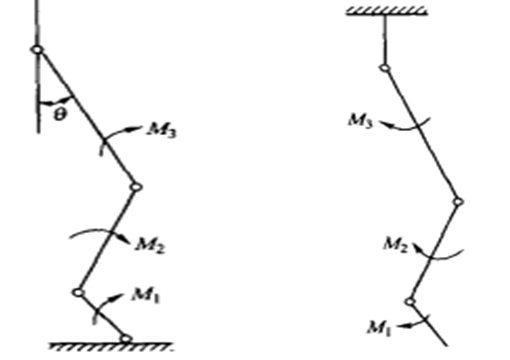
图6.36 三构件腿模型

