
1、履带移动机器人的本体结构
(1)履带机构的形状
常见的履带移动机构有两种形式,如图6.18(a)所示驱动轮及导向轮兼作支承轮,增大了支承面面积,提高了稳定性。如图6.18(b)所示为不作支承轮的驱动轮与导向轮,装得高于地面,其好处是适合于穿越障碍。
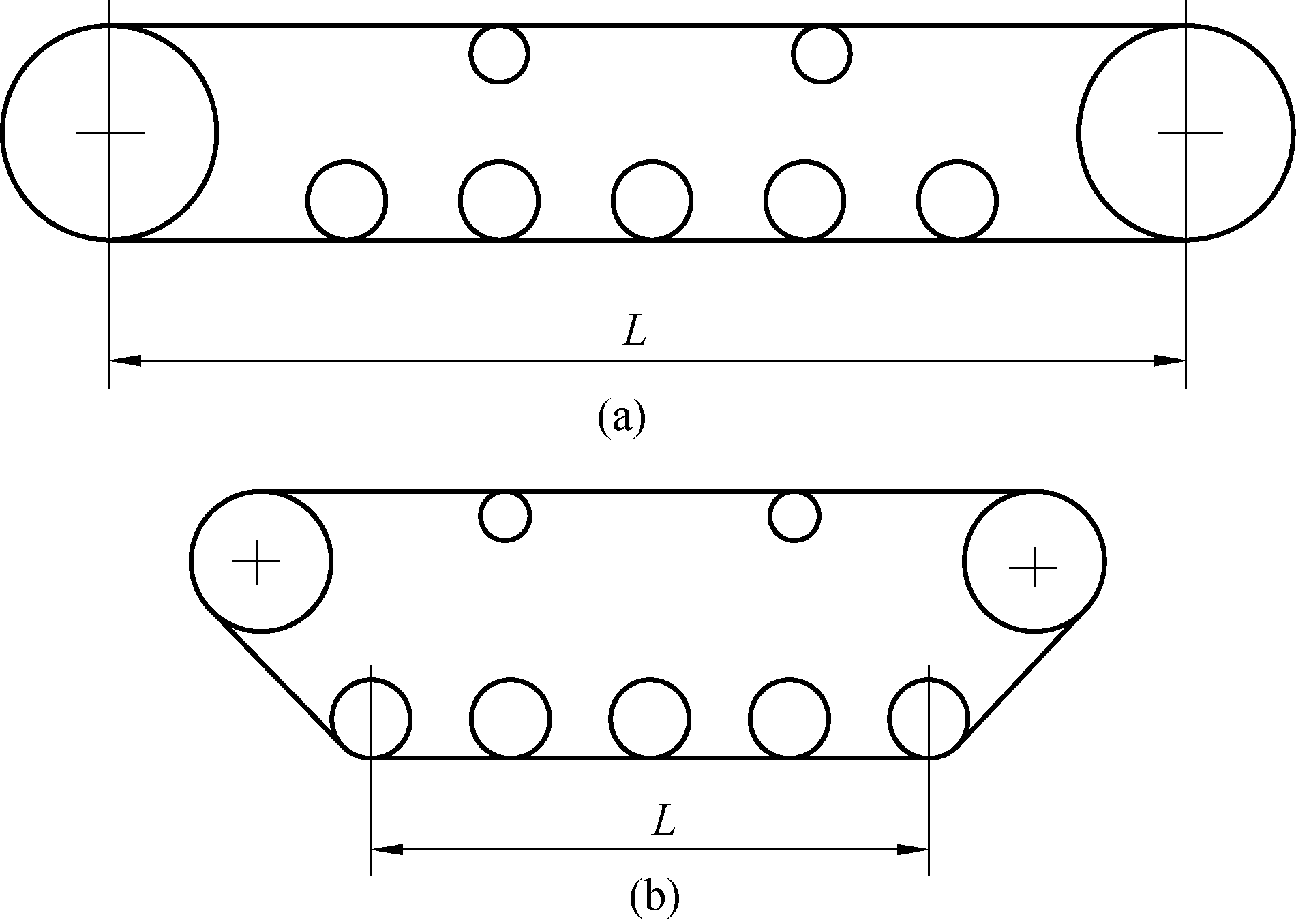
图6.18 两种常见的履带形状
根据实际使用场合的要求,履带也有采取其他形状的,如图6.19所示。
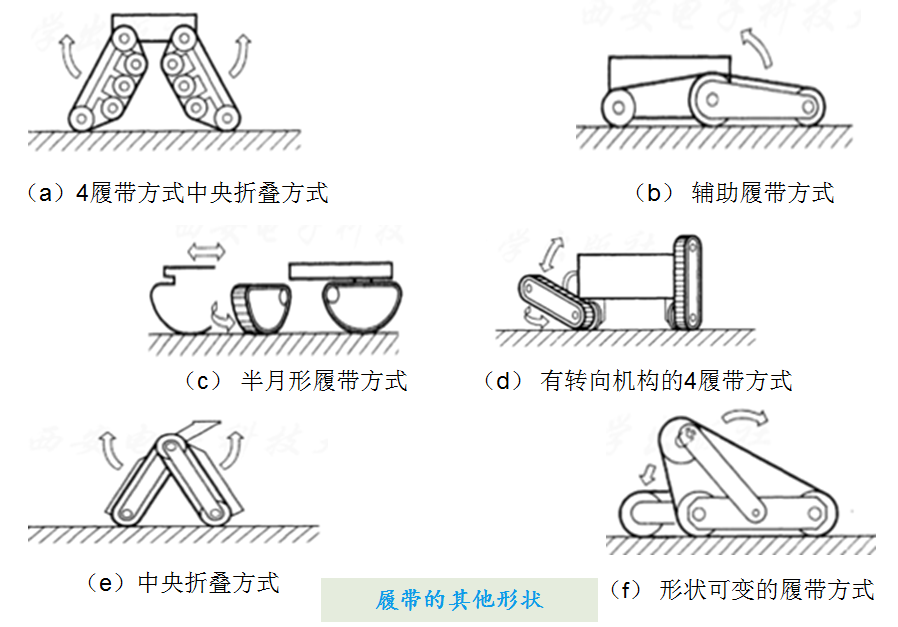
图6.19 履带的其他形状
(2)支承轮
履带式移动机器人的重力主要是通过支承轮压于履带板的轨道传递到地面上。根据履带支承轮传递压力的情况,分为多支点式和少支点式,如图6.20所示。
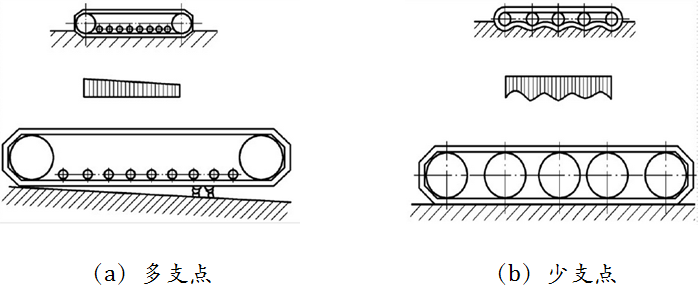
图6.20 支撑轮的数目
(3)履带板
一般情况,每条履带是由几十块履带板和链轨等组成。其结构基本上可分为四部分: 履带的下面为支承面,上面为链轨,中间为与驱动链轮相啮合的部分,两端为连接铰链。根据履带板的结构不同,履带板可分为整体式和组合式,如图6.21所示。
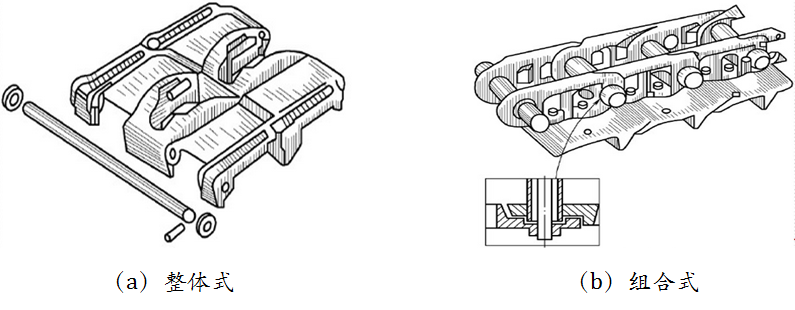
图6.21 整体式和组合式履带板
(4)驱动轮和导向轮
履带两端的导向轮哪一个用来驱动更为合适与履带机构的形状有关。图6.18(a)所示的履带机构,以驱动轮在后方比较有利,履带承载分支处于微张紧状态,运行阻力较小,如图6.22所示。反之,前轮为驱动轮时,履带承载分支部分长度处于压缩弯折状态,运行阻力增大。驱动轮齿数通常为8~10,节距比链轨节距约大1%~5%,考虑链轨磨损后的节距增长,导向轮可以制成无齿的。
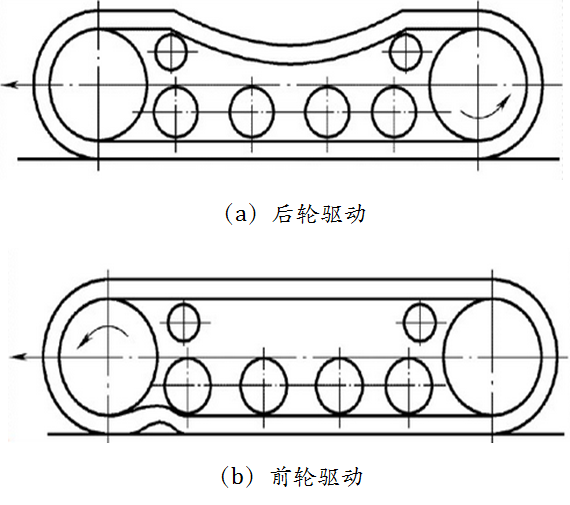
图6.22 前、后轮驱动比较
(5)履带张紧装置
履带装置的节距因磨损而增大,轨链伸长,如不进行调整以保持一定的张紧程度,就易发生脱轨与掉链等情况,因而需要装设张紧装置。图6.23所示出机械式张紧装置的构造。
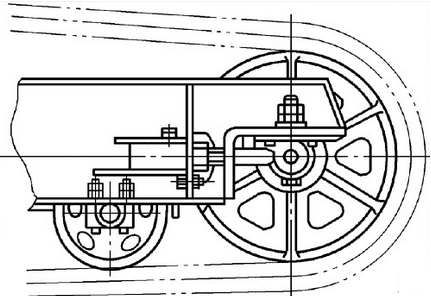
图6.23 履带机械式张紧装置
(6)履带架
履带移动机构的承载架可以制成刚性的,也可以制成活动的。刚性履带架,如图6.24(a)所示,其优点是结构简单;缺点是当地面不平时,履带受力极不均匀。图6.24(b)和(c)所示的履带架可以大大改善载荷的不均匀,但结构比较复杂。
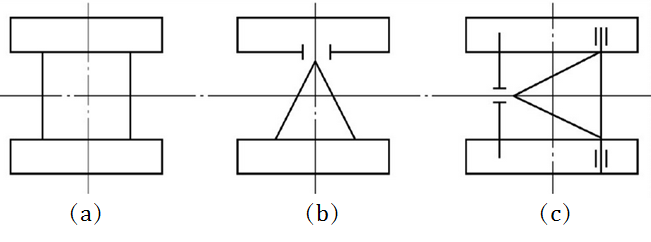
图6.24 履带架
2、履带移动机器人的越障原理
带前摆臂的关节式履带移动机器人(如图6.25所示),只要保证行走机构在结构设计上至少能够同时与两个台阶点接触,就可以使机器人在行走机构的作用下向上爬。
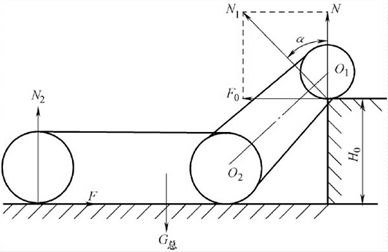
图6.25 爬台阶时整车受力图

