
1、地面移动机器人车轮形式
在轮式地面移动机器人中,车轮的形状或结构形式取决于地面的性质和车辆的承载能力。室外路面行驶的采用充气轮胎,室内平坦地面上的可采用实心轮胎。传统的车轮形状如图6.5所示,这种车轮适合于平坦的坚硬路面。
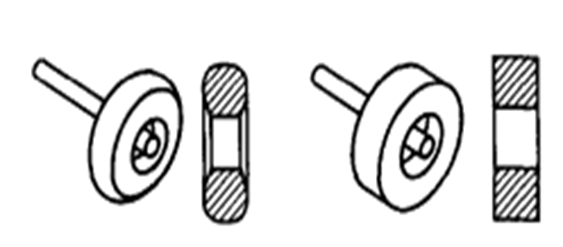
图6.5 传统的车轮形状
图6.6所示的是球轮、充气轮和锥形轮,充气车轮弹性好能吸收因路面不平而引起的冲击和振动,特别适合于沙丘地形。
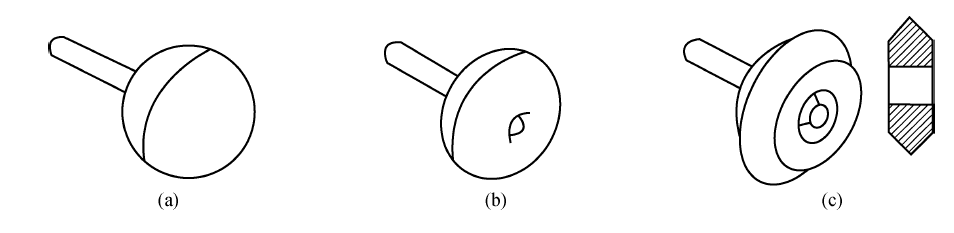
图6.6 球轮、充气轮和锥形轮
(a)球轮; (b)充气轮; (c)锥形轮
图6.7所示的是超轻金属线编织轮和半球形轮。这两种轮是为火星表面移动车辆开发而研制出来的,其中超轻金属线编织轮用来减轻移动机构的重量,减少升空时的发射功耗和运行功耗。
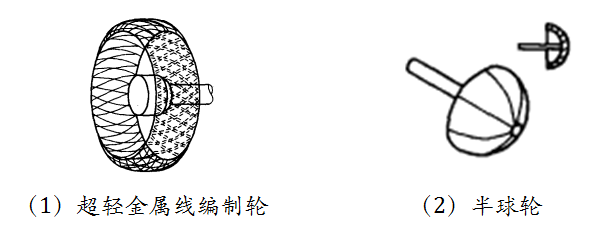
图6.7 超轻金属线编制轮和半球形轮
2、地面移动机器人车轮的配置和转向机构
车轮式移动机构依据车轮的多少分为1轮、2轮、3轮、4轮以及多轮机构。1轮和2轮移动机构在实现上的主要障碍是稳定性问题,新加坡南洋理工大学研制的Segbot双轮机器人(图6.8),该机器人配置了2维激光探测器、差分GPS天线、CCD摄像机等,实现了稳定行走。但实际应用的轮式移动机构多为3轮和4轮。
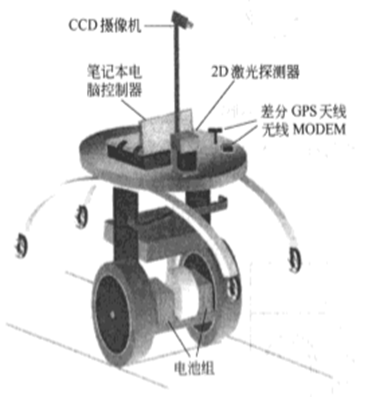
图6.8 Segbot双轮机器人
三轮移动结构是车轮式机器人的基本移动结构,其结构是后轮用两轮独立驱动,前轮用小脚轮实现转向。这种结构的特点是结构组成简单,而且旋转半径可以从0到无限大,任意设定。常见的三轮移动机构布置方式有:两个后轮独立驱动,前轮仅起支承作用,靠后两轮的转动速度差实现转向;也有采用前轮驱动前轮转向的方式;还有利用后轮差动减速器驱动前轮转向的方式。如图6.10所示为三轮车型移动机器人机构。
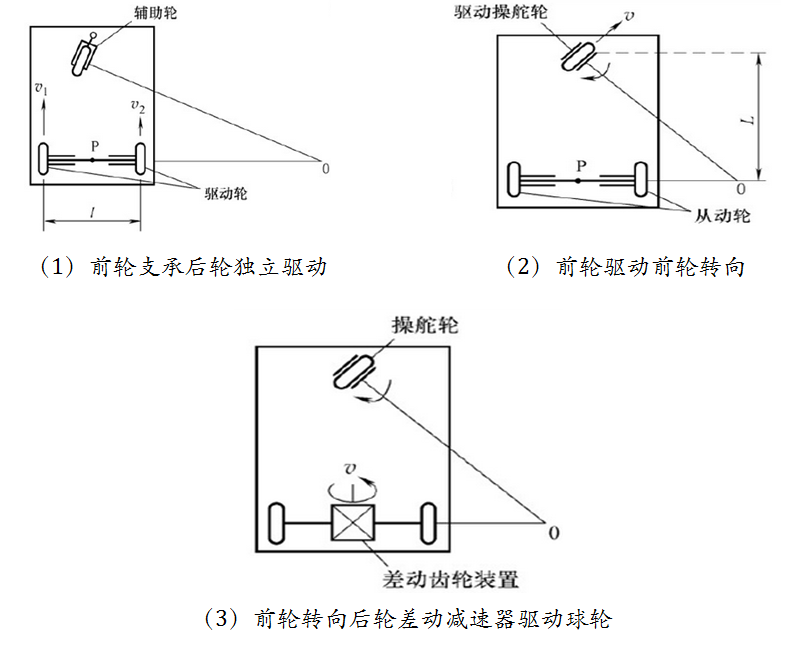
图6.10 三轮车型移动机器人机构
四轮车的驱动机构为两轮独立驱动,如图6.11(a)所示,能够实现整车灵活的零半径回转。图6.11(b)为类似汽车的结构方式,适合于高速行走,小型机器人不大采用。
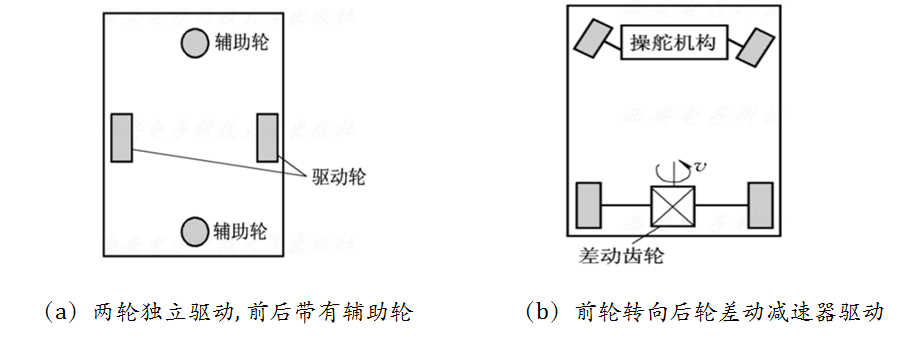
图6.11 Segbot双轮机器人
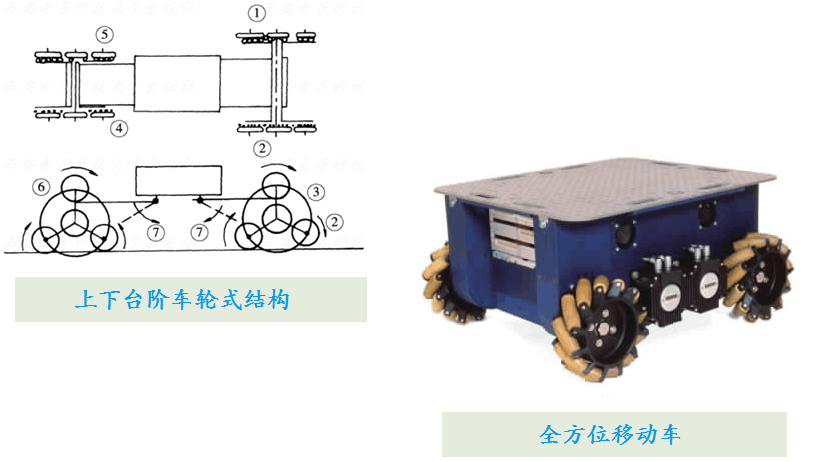
其他移动机构
3、三轮移动机器人运动分析
1)两后轮独立驱动移动机构的运动分析:
如图6.16所示。xOy为固定的基础坐标系。P点为小车上的固定点,后轮的驱动速度分别为和
,跨度为B。
为车体纵轴线与x轴的夹角,φ角为前轮相对于本体的偏转角。
下式为后轮机构运动学中的雅可比阵:
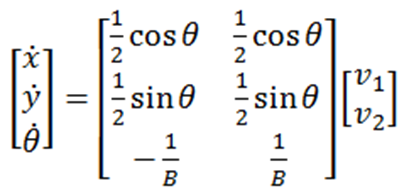
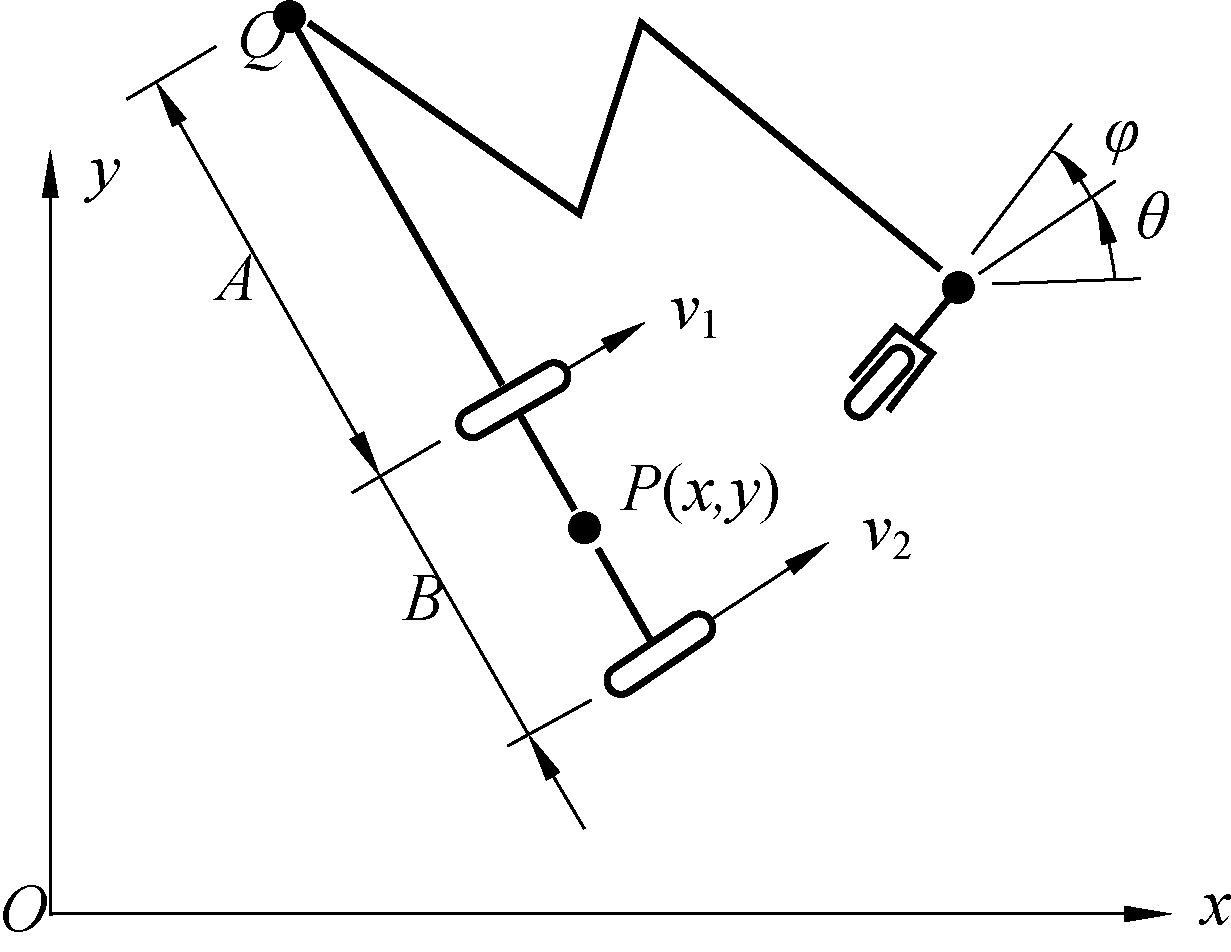
图6.16 两后轮独立驱动移动机构
2)前轮驱动三轮移动机构运动分析:
图6。17所示为前轮转向和驱动的三轮机构。其中前轮驱动速度为v,操舵转速为ω。前轮机构运动学中的雅可比阵为:
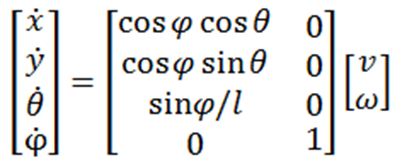

图6.17 前轮驱动移动机构

