
【案例导入】
Atlas是双足人形机器人,如图6.1所示,其运动稳定性一直是学术界研究的难题。他可以在山林雪地里健步如飞。抬脚高度相当高,让其能够适应很大范围的障碍物;同时其不停的快速踏步,选择新落脚点也是其维持平衡的核心因素。和DRC中那些机器人的控制策略完全不同。

图6.1 Atlas双足人形机器人
1、移动机器人的概述
移动机器人是一种自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。固定式轨迹主要用于工业机器人;无固定轨迹就是指具有移动功能的移动机器人。
从移动机器人所处环境看,可以分为结构环境和非结构环境两类。 结构环境一般采用车轮式移动结构。非结构环境领域,可参考自然界动物的移动机构,也可以利用人们开发的履带,设计履带式移动机构。
2、机器人行走结构的特点及应用
目前,移动机器人的行走结构形式主要有: 车轮式移动结构、履带式移动结构、和步行式移动结构。此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,以适合于各种特别的场合的行走。
相比之下,轮式移动机器人由于其具有自重轻、承载大、机构简单、驱动和控制相对方便、行走速度快、机动灵活、工作效率高等优点,而被大量应用于工业、农业、反恐防爆、家庭、空间探测等领域。
3、常见的行走机构
(1) 车轮式移动结构
轮式移动机构在相对平坦的地面上效率最高,行进速度快,转向灵活,而且造价低廉,部件出现问题后可以迅速更换。另外,轮式移动机构控制也相对简单,传统的轮式行走机构有三轮、四轮、六轮的机构形式,尤其六轮机构是目前广泛运用的越障形式。
车轮式移动结构
(2) 履带式移动结构
履带式移动机构适合在复杂路面上行驶,它是轮式移动机构的拓展,由驱动轮、导向轮、拖带轮、履带板和履带架等部分构成,履带本身起着给车轮连续铺路的作用。
履带式移动结构具有以下优点: 地面支撑面积大,接地比压小,滚动摩擦小,通过性能比较好,转弯半径小,牵引附着性能、越野机动性、爬坡、越沟等性能优于轮式移动机构,但普通履带式移动机构越障能力有限。

履带式移动结构
(3) 步行式移动机构
步行式移动机构是基于仿生学原理设计的,目前展开广泛研究的有两足、四足、六足等各种腿足式移动机构,该机构几乎可以适应任何路面的行走,且具有良好的机动性,其运动系统具有良好的主动隔振功能,可以比较轻松地通过松软路面和大跨度障碍。步行式机构的缺点是行进速度低缓,效率低下,而且由于腿部与地面接触面积相对较小,遇到非刚性地面状况时会出现下陷的情况。

步行式移动机构
(4) 爬壁机器人
这种爬壁机器人靠磁性车轮对壁面产生吸附力,其主要特征是: 行走稳定、速度快,最大速度可达9m/min,适用各种形状的壁面,且不损坏壁面的油漆。
我国的哈尔滨工业大学已经成功研制出单吸盘真空吸附车轮行走式爬壁机器人(如图6.3(a) 所示) 和永磁铁吸附履带爬壁机器人,如图6.3(b) 所示。
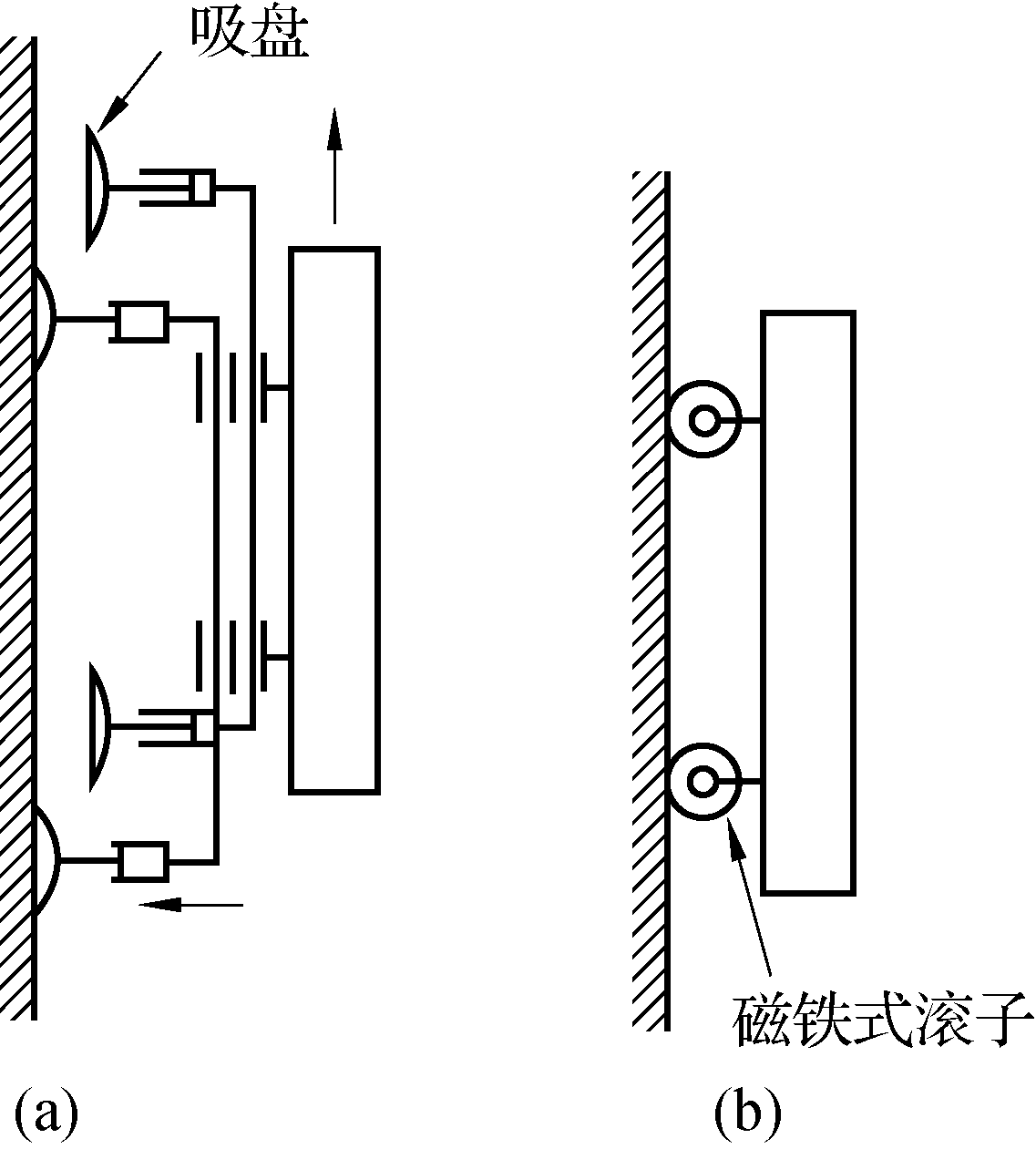
图6.3 爬壁机器人
(a) 吸盘式. (b) 磁吸滚子式
(5) 管道内外移动机器人
管道外移动机器人如图6.4 所示,它的移动主要靠两个轮子,每个车轮两边还有一对支撑架,用来帮助车轮在管道外移动时站立而不倒,并可以增加车轮与管道壁之间的摩擦,从而获得较大的移动力,这种结构可用于检修核管道和煤气主干道等一些容易引发危害的大型管道。
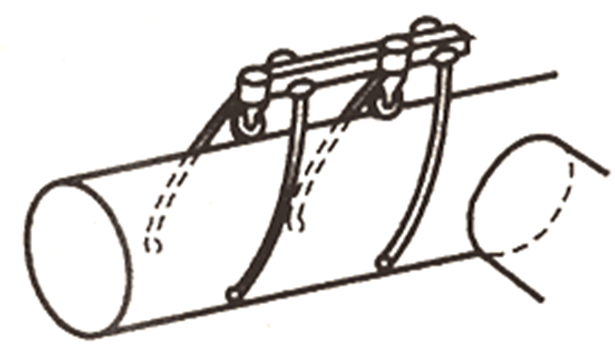
图6.4 管内外移动机器人

